![]()
![]()
![]()
![]()
ForceDimension社製 力覚フィードバック装置

■ ワークスペース
(∅240×170mm)
■ 連続提示反力 20.0N
■ 位置分解能 >0.0015mm
■ 6自由度+1軸把持モデル
■ インターフェイス:USB

■ ワークスペース
(∅190×130mm)
■ 連続提示反力 20.0N
■ 位置分解能 >0.0015mm
■ 6自由度+1軸把持モデル
■ インターフェイス:USB

■ ワークスペース
(∅160×120mm)
■ 連続提示反力 12.0N
■ 位置分解能 >0.01mm
■ インターフェイス:USB

■ ワークスペース
( ∅400×260mm)
■ 連続提示反力 20.0N
■ 位置分解能 >0.02mm
■ インターフェイス:USB
使用例
 |
 |
|
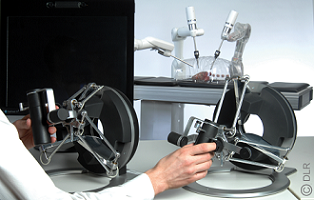
| 独DLR(航空宇宙センター・ロボティクス&メカトロニクス研究所) ロボット手術操作(omega.7を2台使用) |
Automatica2010展示会でのドイツDLRによる ロボット手術操作デモ(sigma.7を2台使用) |
|
 |
 |
|
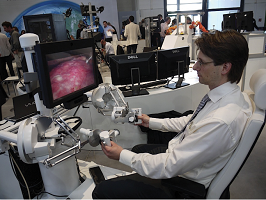
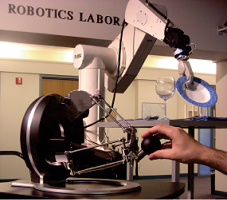
| 米国NASAとSRI研究所による無重力化での 遠隔手術実験(omega.7を2台使用) |
米国スタンフォード大学でのPUMAロボットを 使用した遠隔操作実験(omega.3を使用) |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.