パラレルリンク方式 力覚フィードバック装置
sigma .7

ForceDimension社の力覚フィードバック装置はパラレルリンク方式採用に
より、優れた合成と位置精度を実現、微妙な力覚の表現、確かな反力応答が
求められる遠隔操作やマイクロマニピュレーションといった用途に最適な
システム構成を可能にします。
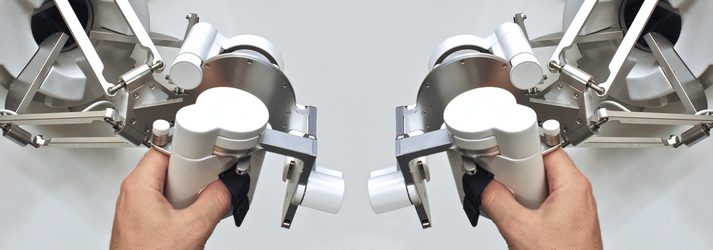
sigma.7は、ForceDimensionがこれまでに設計した中で最も完成度の高いフォースフィードバックデバイスです。
再設計されたデルタベースを導入したこのデバイスは、高精度の力フィードバック把持機能を含む、7つのアクティブな自由度を提供する最初の商用触覚インターフェースです。
完璧な重力補償を表示するように微調整された力とトルクのフィードバックエンドエフェクタは、並外れた触覚性能を提供し、複雑な触覚アプリケーションとの本能的な相互作用を可能にします。
高度な
航空宇宙産業および
医療産業向けに設計されており、ロボットを精巧に遠隔制御できるように設計され、
人間工学に基づいた独特の設計により、sigma.7は安全性が重要なアプリケーションのリファレンスデバイスとなっています。
このデバイスは、左利き用と右利き用の構成で利用でき、両手操作用のデュアルワークステーションに統合できます。
また、
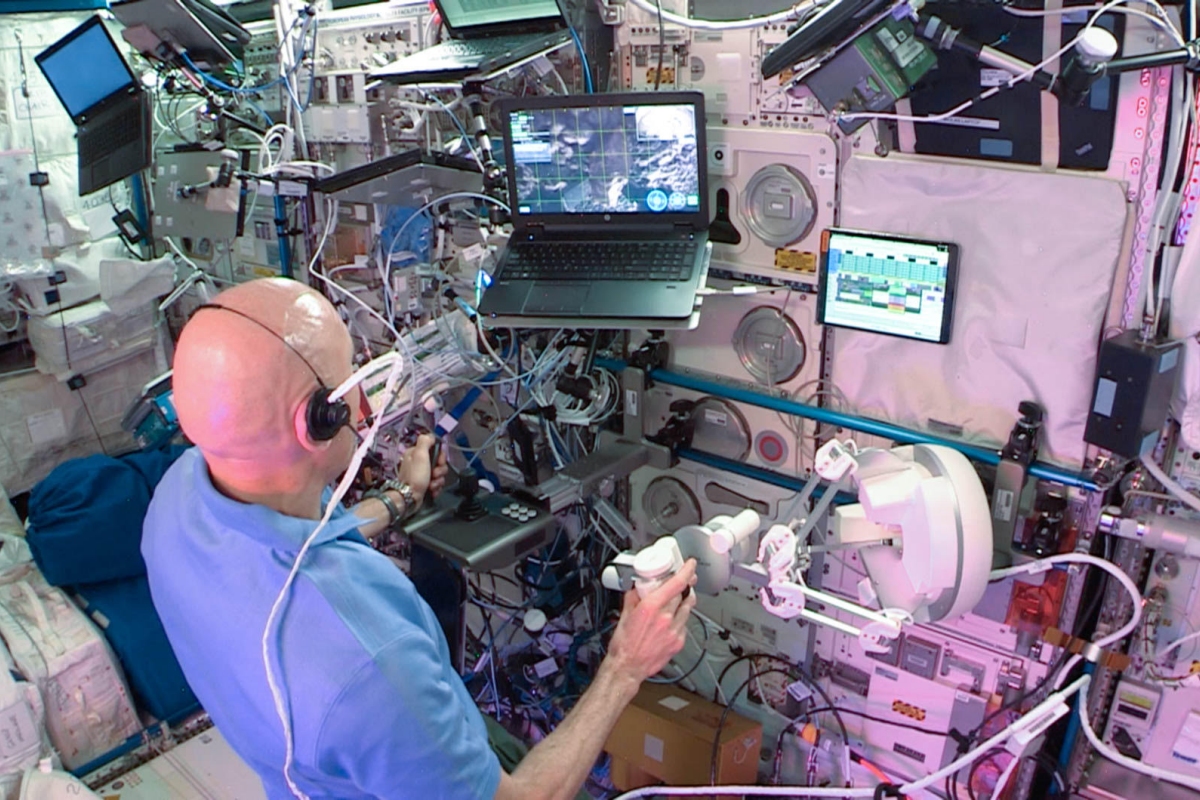
sigma.7は、
国際宇宙ステーション(ISS)における
METERON プロジェクトに採用され、
宇宙で使用された最初で唯一の商用3Dフォースフィードバックインターフェースです。
独自のパラレル キネマティクス構造を中心に精巧に構築されたsigma.7 デバイスは、パフォーマンスを重視して設計されています。
その優れた機械的剛性とリアルタイム USB 2.0 コントローラーの組み合わせにより、
4 KHz に達するレートで高い接触力をレンダリングできます。
最高度の触覚透過性を提供するために、受動コンポーネントと作動コンポーネントを完全に結合することにより、移動および方向空間で正確な重力補償が維持されます。
各システムは個別に校正されており、繰り返し可能で最適な精度と性能を保証します。
その独自のキネマティクス設計により、並進と回転が完全に分離され、sigma.7が可能になります。
最も要求の厳しいアプリケーションの要件を超えるために。Force Dimension社は、sigma.7用のカスタム エンドエフェクタを必要とする専用アプリケーション向けの高度な技術サポートも提供します。
強力な SDK は、ハプティクス モードとロボティクス モードの両方で、すべての Force Dimension デバイスを高度に制御します。
Haptics SDK は、位置を読み取り、デカルト空間で必要な力をプログラムするためのすべての基本機能を提供します。
これらの基本的な機能を拡張する Robotics SDK は、Haptic SDK を活用して高度なリアルタイム ルーチン セットを導入し、
デバイスの位置を正確に制御します。Force Dimension SDK は、マルチスレッド、マルチデバイス プログラミングのサポートを提供し、
Windows、 Linux、 macOS、 QNX 、 VxWorksなどの幅広いプラットフォームで利用できます。
ハプティクスとロボティクスの両方の機能を単一の統合フレームワークに組み合わせることで、開発者は人と機械の間の強力なコラボレーション インターフェイスを作成できます。
| 力覚提示空間 |
並進 |
φ190 mm x 130 mm |
| 回転 |
235 x 140 x 200° |
| 把持 |
25 mm |
| 最大提示反力 |
並進 |
20.0 N |
| 回転 |
40 mNm |
| 把持 |
8.0 N |
| 位置分解能 |
並進 |
< 0.0015 mm |
| 回転 |
0.013° |
| 把持 |
8.0 N |
| インターフェース |
USB2.0
(リフレッシュレート 最大 4 KHz) |
| 電源 |
100-240V |
| プラットホーム |
Microsoft |
Windows |
| Linux |
全てのディストリビューション |
| Apple |
macOS |
| BlackBerry |
QNX |
| WindRiver |
VxWorks |
| SDK |
Haptics SDK
Robotics SDK
CHAI 3D |
| エルゴノミクス |
右手用または左手用のどちらかを選択 |
| 構造 |
デルタベースのパラレルリンク機構
手中心の回転運動
並進運動と回転運動の分離
アクティブ重力補償 |
| キャリブレーション |
自動 |
| ユーザーインプットボタン |
1 (Graso) |
| 安全機構 |
速度監視
電磁ダンピング |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.