![]()
![]()
![]()
![]()
![]()
Haption 力覚応答ロボット遠隔操作システム
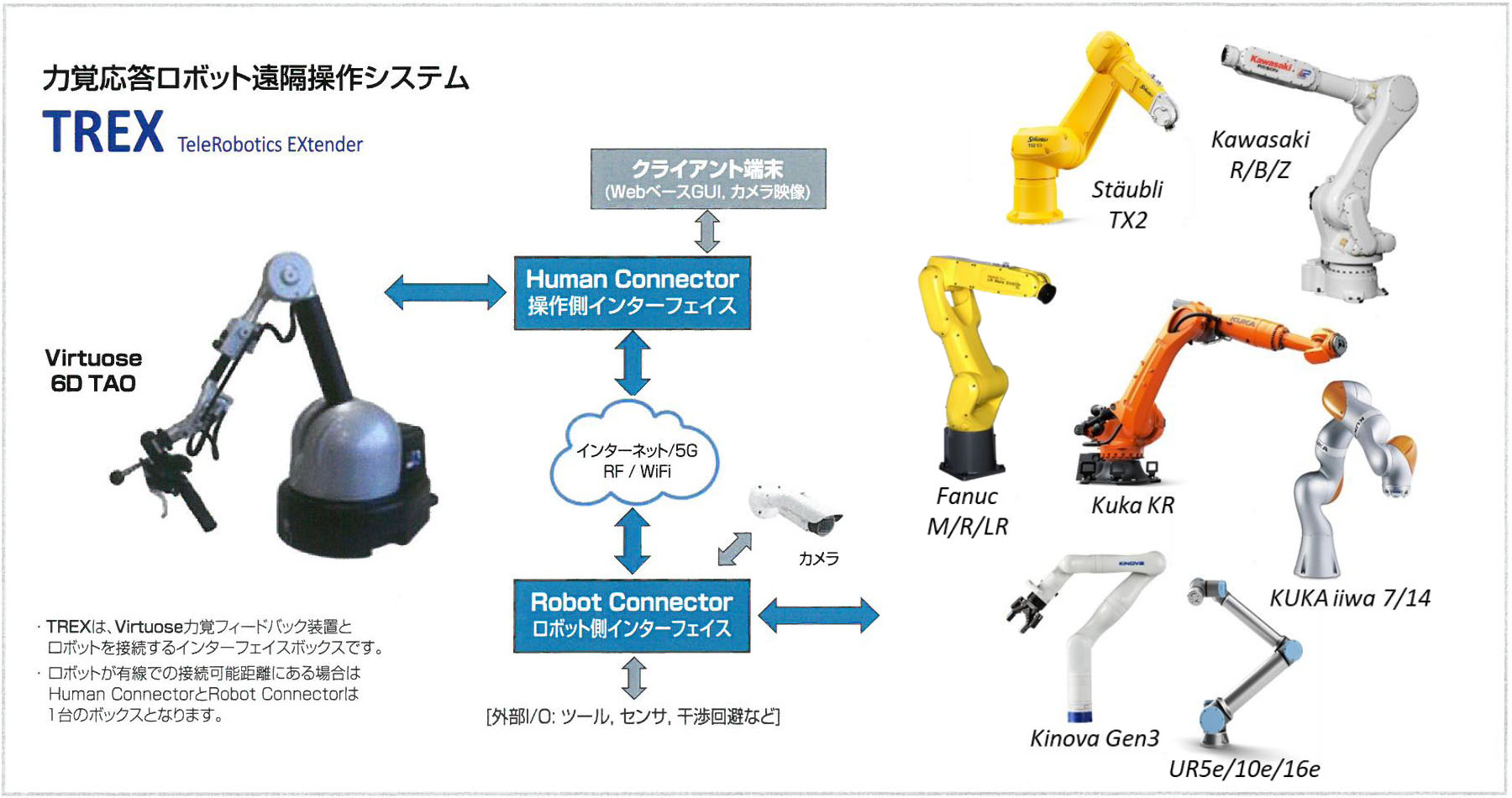
力覚応答による遠隔操作
TeleRobotics EXtender (TREX) は、力覚応答 遠隔操作用に設計されたフレームワークです。 これは、オペレーターが危険、困難、または制限 された環境で操作しなければならない状況に革新 的なソリューションを提供し、リスクにさらされ ることなくタスクを実行できるようにします。 TREXを使用すると、オペレーターは高い器用さ と精度でリモートロボットを手動で制御すると 同時に、Virtuoseデバイスを介して把持した物体 の重量や衝突の可能性など、ロボットのダイナミ クスを感知することができます。 TREXは、ロボットシステムに遠隔操作と力覚 フィードバック装置の統合を実現させる、即時 ソリューションを提供します。 |
||
 |
アプリケーション
 航空産業 |
 自動車産業 |
 ロボティクス |
 原子力施設 |
 化学 |
 医療 |
実用的で直感的なヒューマンマシンインターフェース
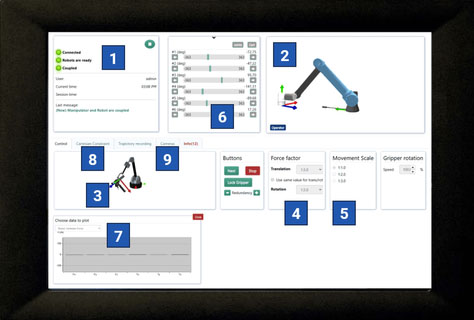
1.遠隔操作ステータスの可視化
2. ロボットの状態をリアルタイムで可視化
3. 力覚デバイスの可視化
4. フォースフィードバックレシオ
5. ムーブメントレシオ
6. 各ロボット軸位置の視覚化および手動制御
7. ロボットの力とトルクの可視化
8. 直交座標制約を使用したオペレーターのガイド機能
9. 静的カメラと動的カメラを使用する場合のオペレーターの視点の選択
Virtuose 6D TAOの特徴
 ・ 大きなワークスペース
・ 大きなワークスペース
人の腕全体の可動範囲をカバーする広大な動作空間
・ 軽量アームで負荷のない操作
フリクションのない軽く滑らかな操作性
・ 設置場所を選ばないコンパクト設計
どこにでも簡単に設置。上下反転や側面配置も可能
・ カスタマイズ可能なハンドル
操作ハンドル部は用途に応じて容易にカスタマイズ可能
動作確認済みロボット
| ロボットベンダー | モデル名 | 動作条件 | フォース フィードバック |
ダイナミック フィードバック |
|---|---|---|---|---|
| FANUC | M20iB-355 M20iD25 M710C-45M |
software v9.30 P13が動作するController R30iBPlus RAMのアップグレードをおこなったP13は4msで動作 |
Yes フォースセンサー オプション |
Yes |
| LR Mate、M & R シリーズ | software v9.30 P13が動作するController R30iBPlus RAMのアップグレードをおこなったP13は4msで動作 |
テスト対象 | Yes | |
| LR Mate、M & R シリーズ | ストリームモーションオプションと互換性のある コントローラーを使用 |
No | Yes | |
| Kawasaki Robotics | RS、BX、MS シリーズ | F60、E01、E02 コントローラー | No | Yes |
| Kinova | Gen3、Gen3 6DOF | - | Yes | Yes |
| KUKA | LBR iiwa 7 R800 LBR iiwa 14 R820 |
KUKA Sunrise 1.16 以降、FRIおよびGripperToolbox | Yes | Yes |
| KR10R900 KR20R1810 KR20R3100 |
KUKA RobotSensor Interfaceを使用した KRC4、KRC5コントローラ |
Yes フォースセンサー オプション |
Yes | |
| KR120R3500 KR180R2500 KR180R2900 |
KUKA RobotSensor Interfaceを 使用したKRC4、KRC5コントローラ | テスト対象 | Yes | |
| その他のKR | KUKA RobotSensor Interfaceを使用した KRC4、KRC5コントローラ |
テスト対象 | Yes | |
| Stäubli | TX2 | uniVALDrive 2を使用したCS9 コントローラー | No | Yes |
| TX2 | VAL3を使用したCS9 コントローラー | No | Yes | |
| Universal Robots | UReシリーズ、UR20 | Polyscope 5.9以降 | Yes | Yes |
| Doosan | H シリーズ | - | Yes | Yes |
| Agile Robots | Diana7 | Ver2.16以降のコントローラー | Yes | Yes |
| Frank Panda | - | Yes | Yes | |
UniversalRobots
 |
Kinova Gen3
 |
Kawasaki Robotics
 |
KUKA
 |
Scale1 CEA Marcoule - 2
 |
NCNR demonstration of Assisted Teleoperation Grasping
 |
Surgical Cockpit - Hamlyn 2019 presentation by ISIR
 |
NSソリューションズ 遠隔操作ロボット(2020)
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.