![]()
![]()
![]()
![]()
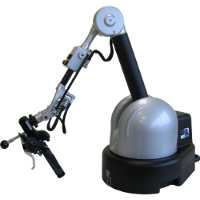
Haption社製 力覚フィードバック装置

■ ワークスペース
1330 x 575 x 1020 mm
■ 最大提示反力
35.0 N / 70.0 N(HFモデル)
■ 位置分解能 0.0016 mm
■ 6軸検出+6軸力覚+3ボタン
■ イーサネット接続
■ ワークスペース
1330 x 575 x 1020 mm
■ 最大提示反力
35.0 N / 70.0 N(HFモデル)
■ 位置分解能 0.0013 mm
■ 6軸検出+6軸力覚
+パッシブグリッパー
+ボタンボックス
■ イーサネット接続

■ ワークスペース
1330 x 575 x 1020 mm
■ 最大提示反力
35.0 N / 70.0 N(HFモデル)
■ 位置分解能 0.0016 mm
■ 6軸検出+3軸力覚+3ボタン
■ イーサネット接続

■ ワークスペース
520 x 220 x 400 mm
■ 最大提示反力 20.0 N
■ 位置分解能 0.023 mm
■ 6軸検出+6軸力覚+3ボタン
■ イーサネット接続

■ ワークスペース
520 x 220 x 400 mm
■ 最大提示反力 20.0 N
■ 位置分解能 0.023 mm
■ 6軸検出+3軸力覚+3ボタン
■ イーサネット接続
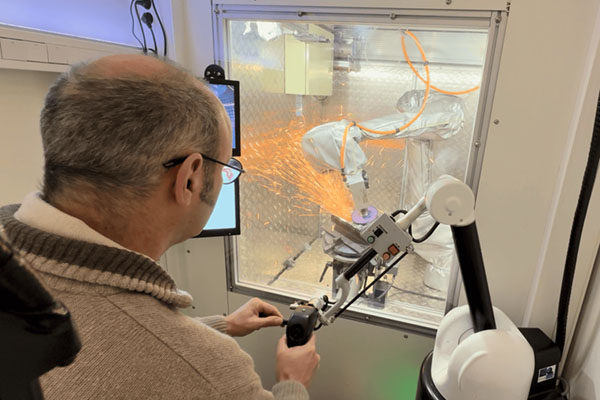
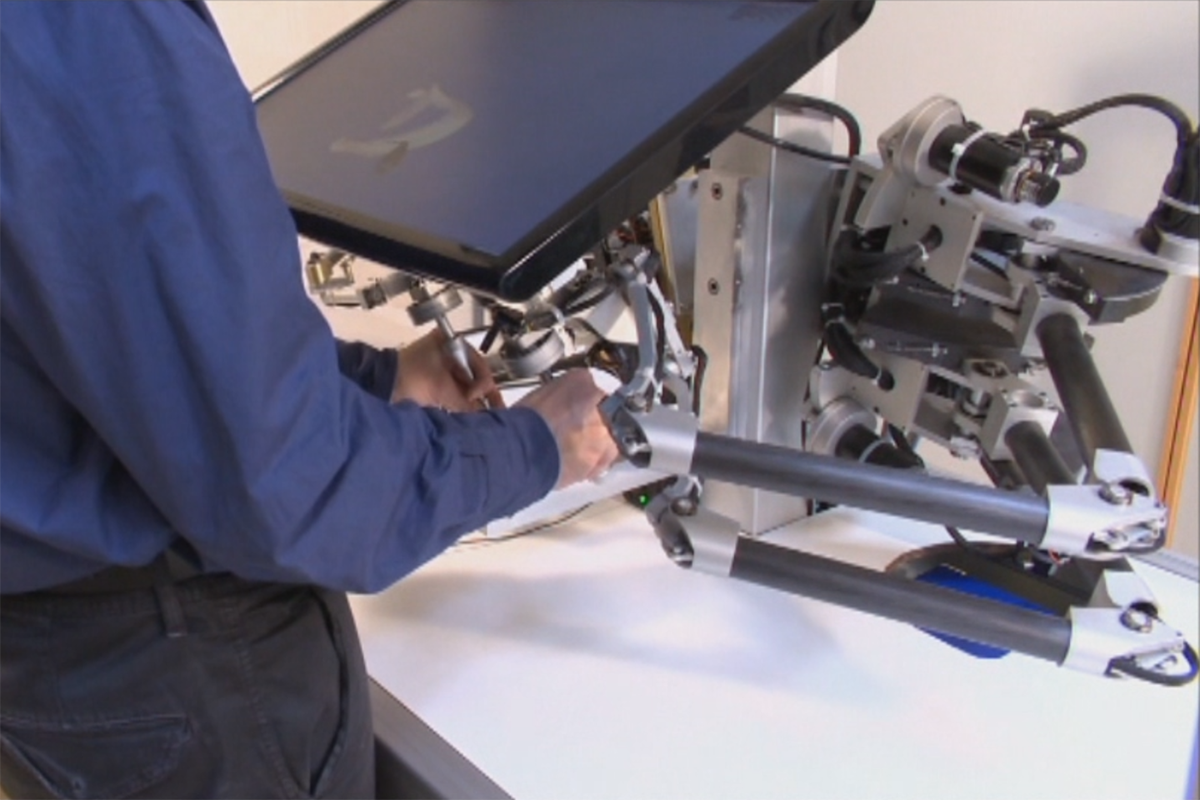
力覚フィードバックによる
ロボット遠隔操作システム
TREX (Tele-Robotics Extender)
比較表
| Virtuose 6D Virtuose 6D HF |
Virtuose 6D TAO Virtuose 6D TAO HF |
Virtuose 3D Virtuose 3D HF |
||
| 動作自由度 | 6自由度 | 6自由度 + アナログフィンガーグリッパー |
6自由度 | |
| 位置検出 / 力覚提示 | 6軸 / 6軸 | 6軸 / 6軸 + アナログフィンガーグリッパー (0-100%) |
6軸 / 3軸 | |
| ワークスペース | 並進 | 1330 x 575 x 1020 mm | ||
| 回転 | 330 x 130 x 270 ° | |||
| 最大提示反力 | 並進 | 35 N / 70N (ハイフォースモデル) | ||
| 回転 | 3.1 Nm | 5 N/m | - | |
| 連続提示反力 | 並進 | 10 N / 30 N (ハイフォースモデル) | ||
| 回転 | 1 Nm / 1.4 Nm (ハイフォースモデル) | - | ||
| 最大制御剛性 | 並進 | 2000 N/m / 10000 N/m (ハイフォースモデル) | ||
| 回転 | 40 Nm/rad | - | ||
| 位置分解能 | 0.016 mm | 0.013 mm | 0.016 mm | |
| 動作周波数 | 1000 Hz | |||
| 本体重量 | 12 kg | |||
| エンドエフェクタボタン | 3 (クラッチ x 1 ユーザ定義 x 2) |
3 + グリッパー開閉 (クラッチ x 1 ユーザ定義 x 2) ボタンボックス(6) |
3 (クラッチ x 1 ユーザ定義 x 2) |
|
| ホストインターフェイス | Ethernet | Ethernet EtherCAT(オプション) |
Ethernet | |
| 電源 | 100-240 VAC 50/60Hz | |||
| 消費電力 | 標準:200W 最大:540W | |||
| Desktop 6D | Desktop 3D | |||
| 動作自由度 | 6自由度 | |||
| 位置検出 / 力覚提示 | 6軸 / 6軸 | 6軸 / 3軸 | ||
| ワークスペース | 並進 | 520 x 220 x 400 mm | ||
| 回転 | 260 x 95 x 240 ° | 260 x 105 x 360 ° | ||
| 最大提示反力 | 並進 | 10 N | ||
| 回転 | 0.8 Nm | - | ||
| 連続提示反力 | 並進 | 3 N | ||
| 回転 | 0.2 Nm | - | ||
| 最大制御剛性 | 並進 | 1000 N/m | ||
| 回転 | 4 Nm/rad | - | ||
| 位置分解能 | 0.023 mm | |||
| 動作周波数 | 1000 Hz | |||
| 本体重量 | 4.6 kg | 3.6 kg | ||
| ホストインターフェイス | Ethernet | |||
| 電源 | 100-240 VAC 50/60Hz | |||
| 消費電力 | 200W 以下 | |||
使用例
 |
 |
 |
 |
 |
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.