![]()
![]()
![]()
![]()
HandHIRO
![]()
 |
仕様
| |||||||||||||||||||||||||||
対向型5指ハプティックインターフェイスロボット 『HandHIRO(Hand Haptic Interface Robot)』は臨場感ある
バーチャルリアリティ環境を実現するために開発された、多点力覚提示可能なハプティックインターフェイスロボットです。
特長
HandHIROは、アームと5本の触覚指を持つハンドから構成されています。ユーザは指フォルダを着け、この5本の触覚指と連結します。
この触覚指を通して、HandHIROはユーザーの5本の指さきに力覚を提示します。
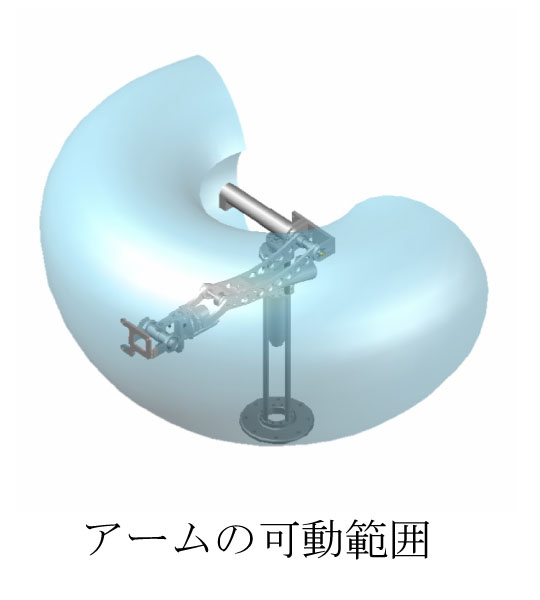
アームは6自由度、ハンドは15自由度あり、HandHIROは計21自由度の超田自由度システムとなっています。このため広い操作空間の
確保が可能です。また、このような超多自由度システムは、制御が複雑で動かすのが困難ですが、HandHIROを制御するうえで十分な
基本コマンドを用意しているため、効果的なプログラム開発が行え、購入してすぐに研究用ツールとして利用できます。
また、指先のみ拘束する構成のため、ユーザーの手に対する圧迫感はなく、かつ設置型インターフェイスであるため、仮想物体の重量感
も提示できます。
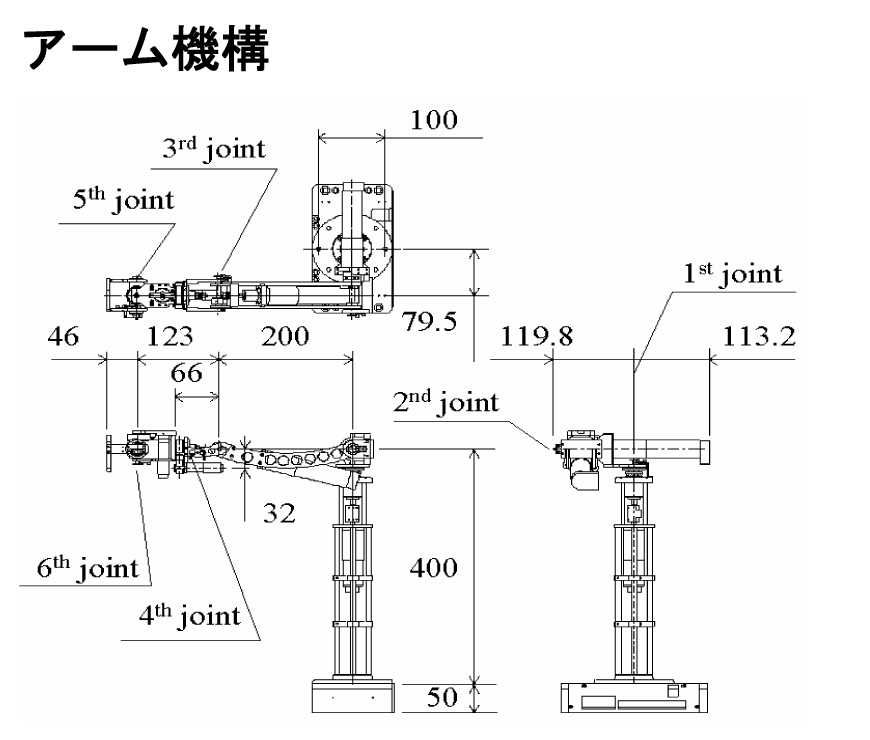
アーム
アームは上腕と前腕から構成され、肩部に3自由度、肘部に1自由度、手首部に2自由度の合計6自由度を持っています。
ユーザが卓上で作業できるよう設計されており、アームの連動により、ハンドの位置・姿勢をユーザの手の位置・姿勢に追従できます。
 *クリックで拡大 |
アーム仕様
|
 |
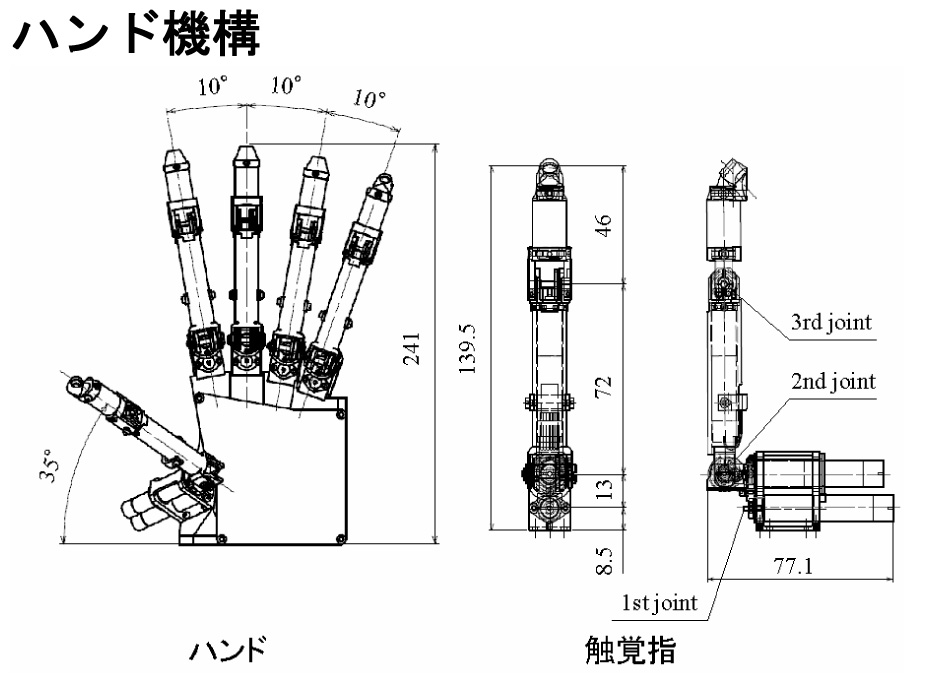
ハンド
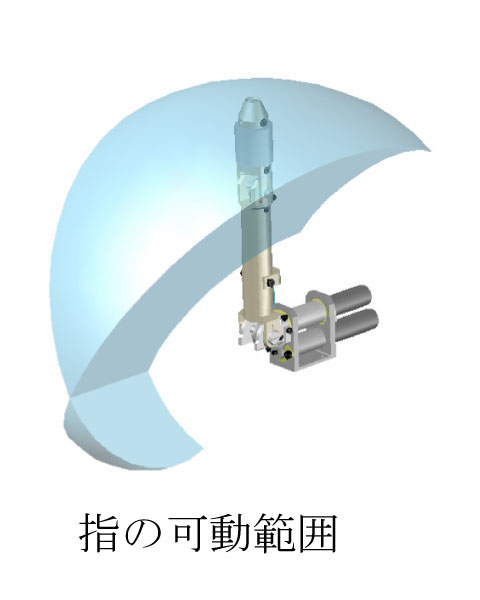
ハンドは5本の触覚指を持ち、各触覚指は3関節3自由度あります。触覚指先端には3軸力センサが搭載されており、これにより指先力を
検出します。
HandHIROのハンド制御部として、FPGAを用いたインターフェイス回路、15chのモータドライバ回路及び3軸力センサ増幅回路から
なるハンド制御装置が掌部に内蔵されており、PCとのLANによる通信機能が実現されています。
 *クリックで拡大 |
ハンド仕様 ・親指
|
 |
制御装置及び制御ライブラリ
HandHIROの制御装置は、443 x 222 x 464 mmの小型制御ボックスです。またHandHIROは合計21自由度の超多自由度システムです。
このようなシステムは制御が複雑ですが、制御するうえで必要な基本コマンドを制御ライブラリとして用意しているため、効果的な
プログラム開発が行えます。
表彰
copyright (C) Nihon Binary Co., Ltd., All rights reserved.