![]()
![]()
![]()
![]()
![]()
5本指超技巧ロボットハンド
Shadow Dexterous Hand
 |

人間の指の動きならではの器用さを再現 |
概要

Shadow Dexterous Handは、人間の手の動きを極めて忠実に再現する、最先端のロボットハンドです。
精巧に設計された5本の指は、人の指に相当する把持力と応答速度を持ち、24の関節によって自在な動きを可能にします。
各関節に実装されたセンサが指に伝わる力を検知し、硬いものはしっかりと柔らかいものは軽くつかみ、壊れやすいもの
でも壊さずつかむコンプライアンスが保たれます。
また物に触れた事を検知する触覚センサが指先に組み込まれており、更にオプションで指先に伝わる力の方向や振動を
検知する多感覚センサも用意されています。
全ての関節を制御するアクチュエータ、センサ、制御及びインターフェイス回路は、一体型のハンドユニット内に収められ
ており、アームやマニピュレータへの取り付けと操作を容易にしております。
Shadow Dexterous Handは、人間の手ならではの柔軟で巧みな物体把持を可能にしますので、ロボットマニピュレー
ションの研究や様々な把持技術の開発のための理想的なツールとして活用されています。
さらに最近では、データグローブやモーションキャプチャと組み合わせて、遠隔操作による危険物処理方法の実証、
未来の料理ロボットのコンセプト提案、先端ロボット技術との組み合わせによる製品プロモーション、人工知能による
自動把持実験など、幅広い分野での応用が広がりつつあります。
24関節・人間の手を模した精巧な構造
Shadow Dexterous Handは平均的な成人男子の手の大きさに合わせて作られており、その動きも人間が行う極めて細かい
所作も再現することができます。親指を除く4本の指は3自由度の動きと4つの関節を持ち、親指は5自由度5関節を備え、
小指には内側に曲がるもう1つの関節が付いています。さらに手首に前後左右に曲がる2自由度2関節があり、合計20自由度
24関節の構造になっています。
129個の内蔵センサによる高度な制御
Shadow Dexterous Handには、関節角度、関節トルク、指先にかかる力などを検出するための各種センサが、合計で
129個内蔵されています。これらセンサの情報を用いた高度な制御が可能なため、遠隔操作においてはハンドの状態を
正確に把握しながら最適な動作を行わせることができます。標準の右手タイプに加えて左手タイプと併用した両手構成も
用意しています。
高速通信・オープンソース開発環境
外部インターフェイスとしてEtherCATを採用、センサ情報の収集と駆動制御に最高1kHzの高速通信を実現することで、
わずか0.5秒で指を閉じることができます。
開発環境として、世界標準のロボット制御用オペレーティングシステムROS (Robot Operating System)を完全対応、
オフライン開発を可能にするシミュレータモデルも提供されています。
仕様

| 指 本数 | 5 |
| 可動関節数 | 24 |
| 動作自由度 | 20 |
| 最大把持重量 | 5.0 kg (包み込み把持) |
| 内蔵センサ数 | 129 (関節角度、関節トルク、指先接触力、電流値、湿度) |
| 外形寸法 | 448 mm(全長) x φ135 mm |
| 本体質量 | 4.3 kg |
| 通信インターフェース | 1 Khz (EtherCAT) |
| 開発環境 | C++、Python、ROS |
| 制御用PC | 付属(Ubuntu) |
| 電源 | 48VDC @ 2.5A (100V ACアダプタ付属) |
軽量ロボットハンド Shadow Hand Liteシリーズ

Shadow Dexterous Hand Lite
Shadow Dexterous Handの機能をほぼそのままに、小型・軽量・低コストを実現しました。
小指や手首がないため、様々なロボットアームに簡単に取り付けることができます。

Shadow Dexterous Hand Extra Lite
3本指のShadow Dexterous Hand Extra Liteは、さらに一歩進んだ軽さを実現しています。

Shadow Dexterous Hand Super Lite
最軽量 2本指モデル
| Lite | Extra Lite | Super Lite | |
| 指 本数 | 3 + 1 (親指) | 2 + 1 (親指) | 1 + 1 (親指) |
| 可動関節数 | 16 | 12 | 8 |
| 動作自由度(DOF) | 13 | 10 | 7 |
| アクチュエーター数(DCモーター) | 13 | 10 | 7 |
| 指先接触センサー数 | 4 | 3 | 2 |
| 慣性計測ユニット(IMU)数 | 1 | 1 | 1 |
| テンドン荷重センサー数 | 26 | 20 | 14 |
| 外形寸法 (mm) | 327 x 120 x 109 | 327 x 120 x 109 | 327 x 120 x 109 |
| 重量 | 2.4 Kg | 2.1 Kg | 1.8 Kg |
| 通信インターフェース | 1 Khz (EtherCAT) | 1 Khz (EtherCAT) | 1 Khz (EtherCAT) |
| ROS 対応 | Yes | Yes | Yes |
| ロボットアームへの取り付け | Yes | Yes | Yes |
| 上位モデルへのアップグレード | Yes | Yes | Yes |
| データシート | |
|
オプション
 |
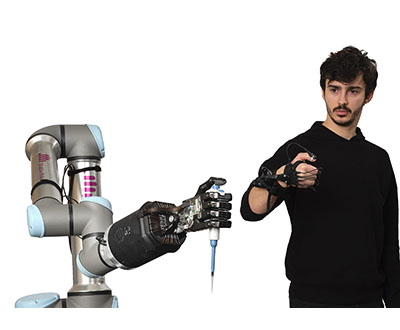 |
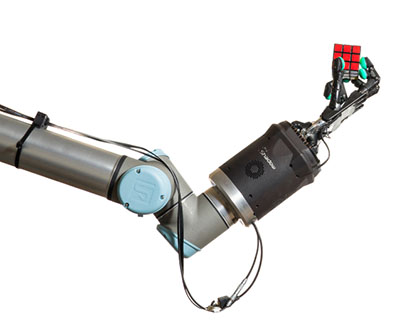
| ロボットアーム | 遠隔操作システム |
| ロボットアームに取り付ける事で ShadowHandの可動域を広げる ことができます。 UNIVERSALROBOTS社製 協働ロボット |
データグローブでShadowHandを遠隔 操作することで、あなたの動きを正確に 再現します。 協働ロボットと組み合わせることで 遠隔地での複雑な作業を行うことが できます。 Tactile Telerobot 触覚遠隔ロボット |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.