![]()
![]()
![]()
![]()
SPIDAR-G 力覚応答ロボット遠隔操作システム
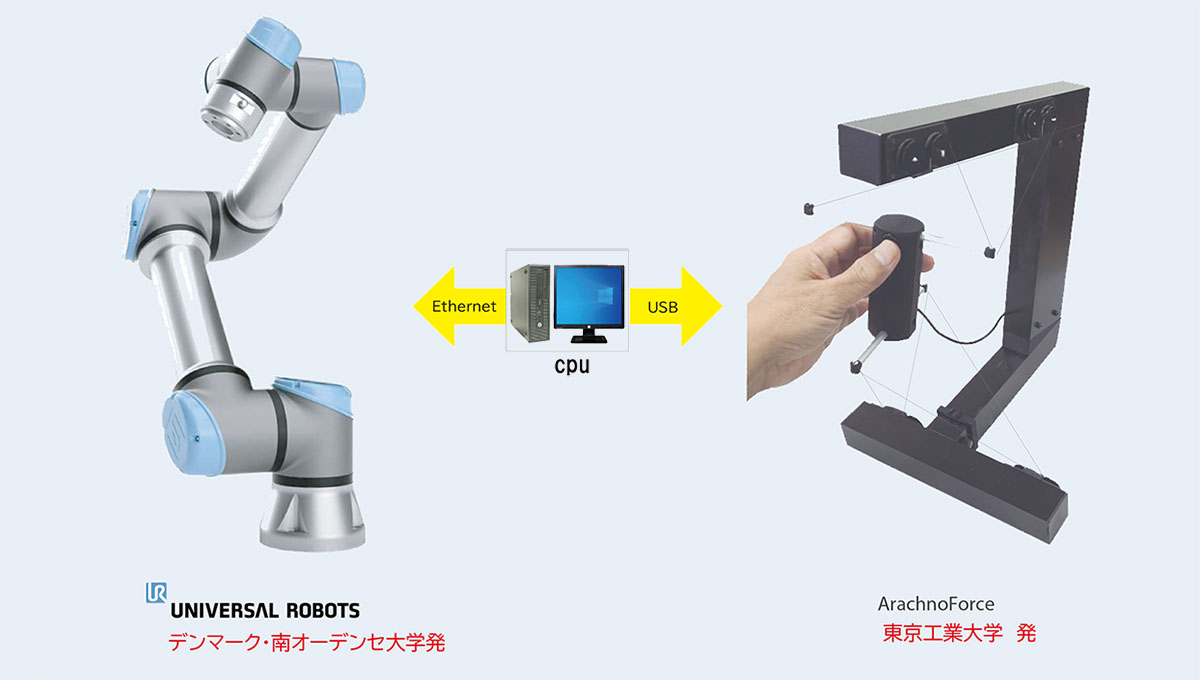
| 協働ロボット ユニバーサルロボット eシリーズ |
ワイヤ駆動型 力覚提示装置 SPIDAR-G2 |
|
■ 設置すれば即稼働 ■ 簡単プログラミング ■ 柔軟な再配置と転用 ■ 卓越した安全機能 |
■ 6自由度力覚提示 ■ 交換可能な軽量ハンドルで 忠実性の高い力覚表現 ■ ワークスペースを柔軟に 拡張できるスケーラビリティ |
|
・ 見やすく直観的なプログラミング ・ さらに強化された17種類の安全機能 ~ そのすべてがEN ISO 13849-1 カテゴリ3、 PL dに対応 (TUV NORD認証) ・ 高精度 ±0.03mm (UR10e/16eは±0.05mm) ・ 500Hz 高速制御/通信周期 ・ 手首に力/トルクセンサを標準装備 ・ ティーチペンダントはタッチパネルによる簡単入力 ≪詳しく見る≫ |
・ 力覚提示:6自由度 ・ 位置検出:6(X、Y、Z、Yaw、Pitch、Roll) ・ ワークスペース:150 x 150 x 100 mm ・ 分解能:0.05 ㎜ ・ 通信周期:1KHz ≪詳しく見る≫ |
力覚応答による遠隔操作
危険作業や過酷環境下における省人化のためのロボットによる遠隔操作広く適用される中、操作用装置として力覚フィー
ドバック装置を使用することで、正確で安全な遠隔操作が可能となります。
ロボットの関節制限や動きの慣性力を作業者がその腕で感じることで、ロボットを的確に制御することができます。
あるいはロボットの干渉や不可を感知することで、ロボット本体や周囲環境への接触事故を回避することができます。
視覚のみでのロボット遠隔操作に力覚応答が加わることで、正確性や安全性の向上ばかりでなく、操作が格段に容易に
なり、作業者の負担を大幅に軽減します。
作業環境やsの内容、求められる作業品質などの条件に応じた理想的なロボット遠隔操作を実現するための、多様な力覚
提示装置を用いたシステムを提供します。
copyright (C) Nihon Binary Co., Ltd., All rights reserved.