![]()
![]()
![]()
![]()
![]()
研究用途向け 5本指 擬人化ロボットハンド
qb SoftHand Research

研究用途向け 5本指 擬人化ロボットハンド


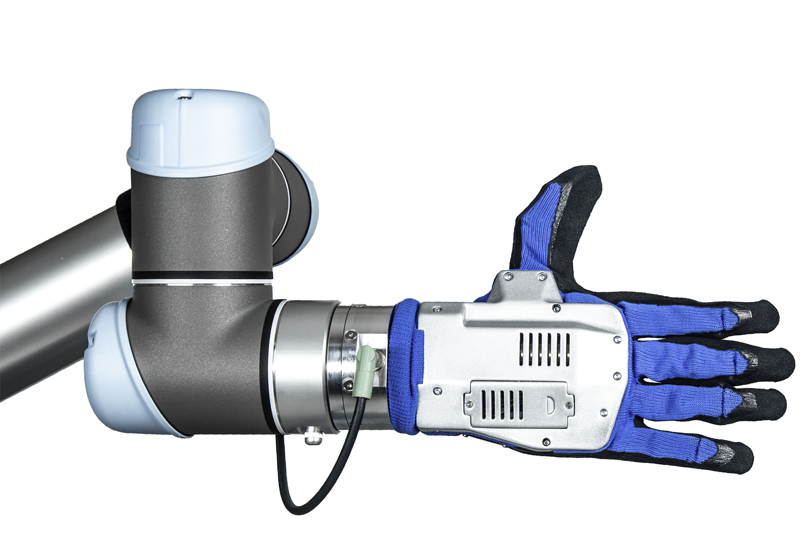






qb SoftHandは、soft-roboticsテクノロジーに基づいた擬人化ロボットハンドで、柔軟性が高く、適応力が
あり、周りの環境、物体、人と共同作業を行う事が出来ます。オペレータにケガを負わせたりする事なく、
製品を破損させる事やロボット本体を破損するリスクを最小限にします。
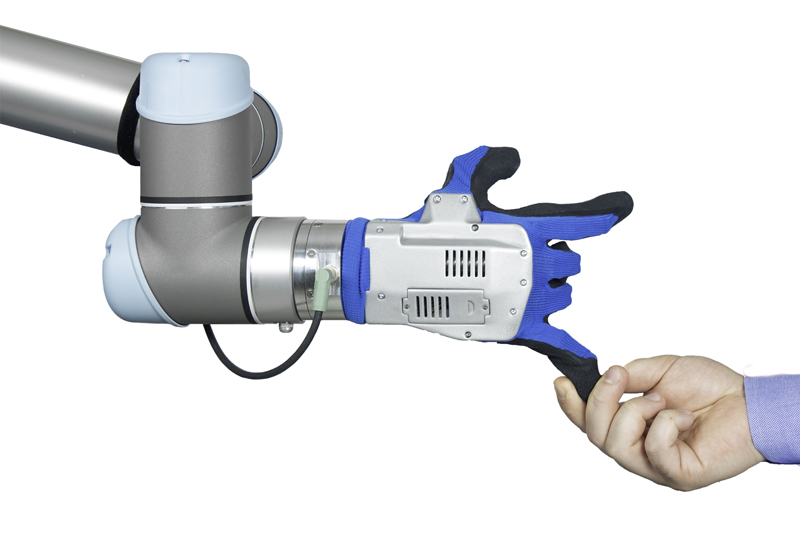
qb SoftHandは適応性が高く、制御を変える事無く様々な物体を掴む事が出来ます。
qbrobotics社では、シナジーの原理を利用したシンプルで本質的に優れた設計をしており、人との接触の際に
安心である他、さまざまな物体を掴む際、制御を変えずに行う事が出来ます。
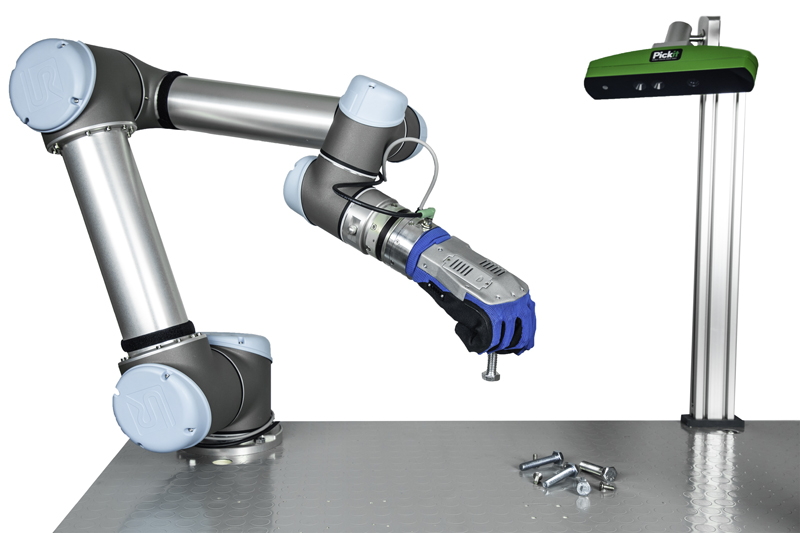
これらの革新的技術の組み合わせにより、多種多様な対象物を掴むことができる柔軟ハンドを作る事が出来ま
した。単一モーター制御により、一つの制御信号のみで手の開閉を行うことが出来るため、制御は非常にシン
プルです。
※本製品は研究用途向けの製品となっております。
業務での使用を想定している場合はqb SoftHand Industryを選択してください。
仕様
| 重量 | 500 g | |||
| 指本数 | 5 本 | |||
| 関節数 固定部 可動部 |
19 個 5 個 14 個 |
|||
| モーター | ブラシ付DC x 1 | |||
| 把持力 把持(Power) 把持(Pinch) 吊下 |
Pinch構成 定格 1.7 kg (ピーク 1.7 kg) 定格 0.83 kg (ピーク 0.83 kg) 定格 20 kg (ピーク 20 kg) |
Power構成 定格 1.9 kg (ピーク 2.6kg) - 定格 20 kg (ピーク 20 kg) |
||
| 最大把持力 (Power) (Pinch) |
Pinch構成 定格 62 N (ピーク 75 N) 定格 20 kg (ピーク 20 kg) |
Power構成 定格 84N (ピーク 106 N) - |
||
| サイクルタイム -完全に閉じる -完全に開く |
1.1 秒 1.1 秒 |
|||
| 耐久性 (ハンド開閉) | 50,000 回 | |||
| 指1本 指4本 指5本 |
衝突速度 衝突速度 衝突力 |
4.7 m/秒 4.7 m/秒 200 N |
| 12VDC | 24VDC | |
| 消費電力 定格 待機時 |
30 W 1.1 W |
30 W 1.4 W |
| 始動電流 | 11.8 A | 6.51 A |
| 通常時電流制限 定格 最長連続稼働時間 最大デューティー比 |
1.5 A 300 秒 | 0.75 A 300 秒 69 % |
ピーク時の電流制限 Peak、apeak 最長連続稼働時間 最大デューティー比 |
2.2 A 20 秒 56 % |
1.1 A 20 秒 56 % |
| ソフトウェア | URCap(ユニバーサルロボット)、handGUI(Windows)、 handGUI(mac)、handgui(linux)、CommandLine Tools、 qbAPI C++ライブラリ、qbhand ROSパッケージ |
| 制御 | モーター位置フィードバック、電流フィードバック |
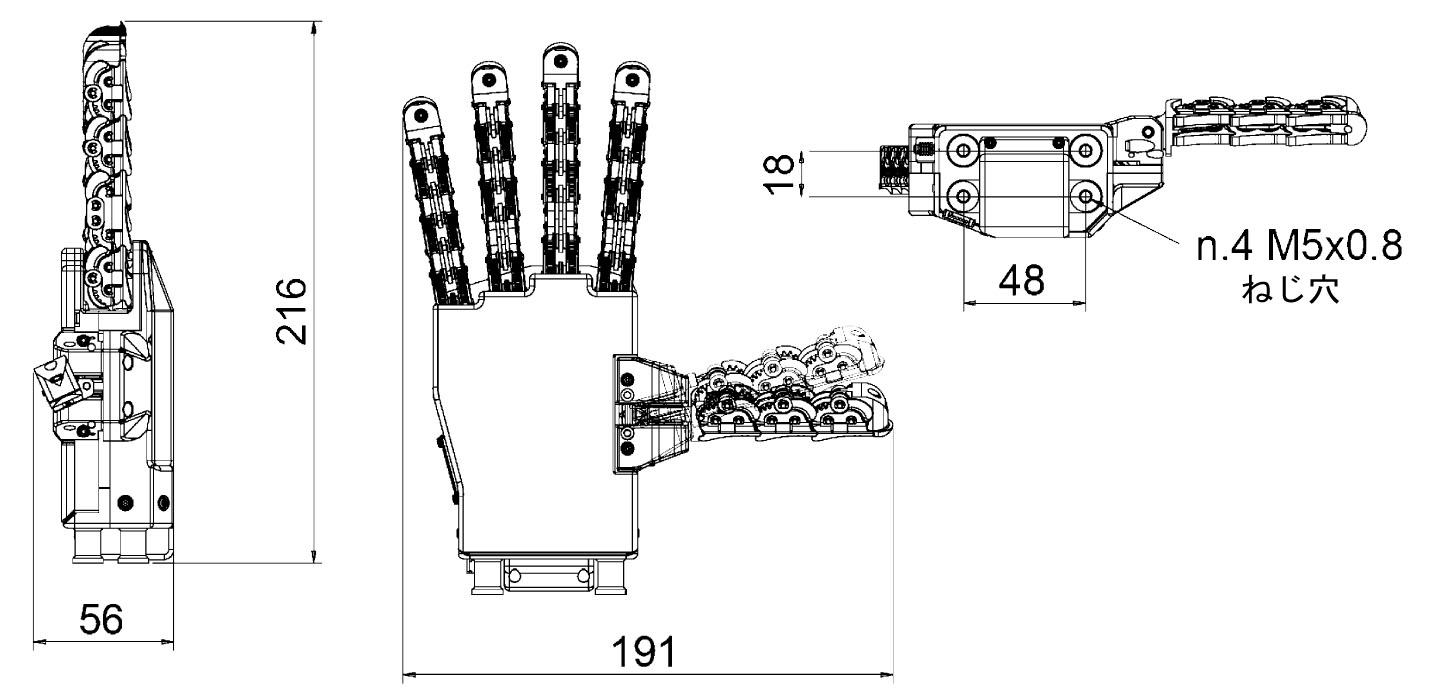
外観図
copyright (C) Nihon Binary Co., Ltd., All rights reserved.