![]()
![]()
![]()
![]()
![]()
qbSoftClow
硬い物から柔らかい物まで柔軟に対応
2指グリッパー
![]()
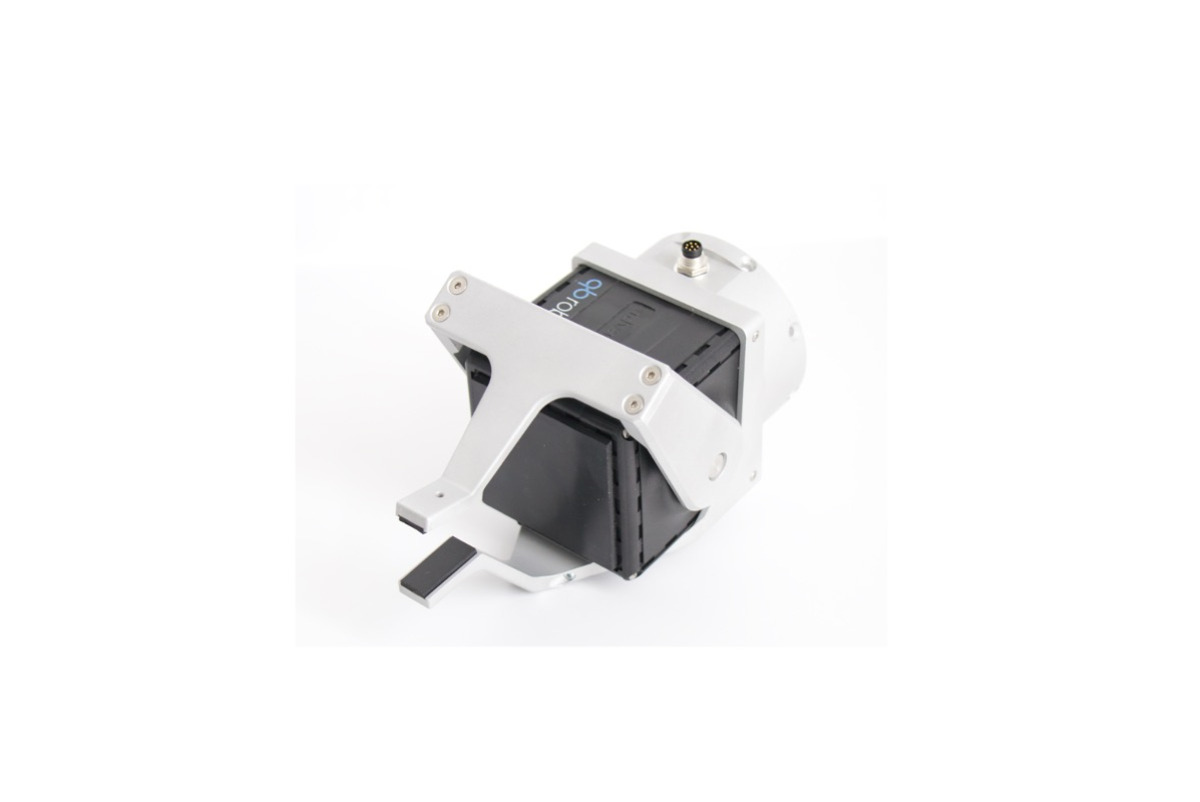
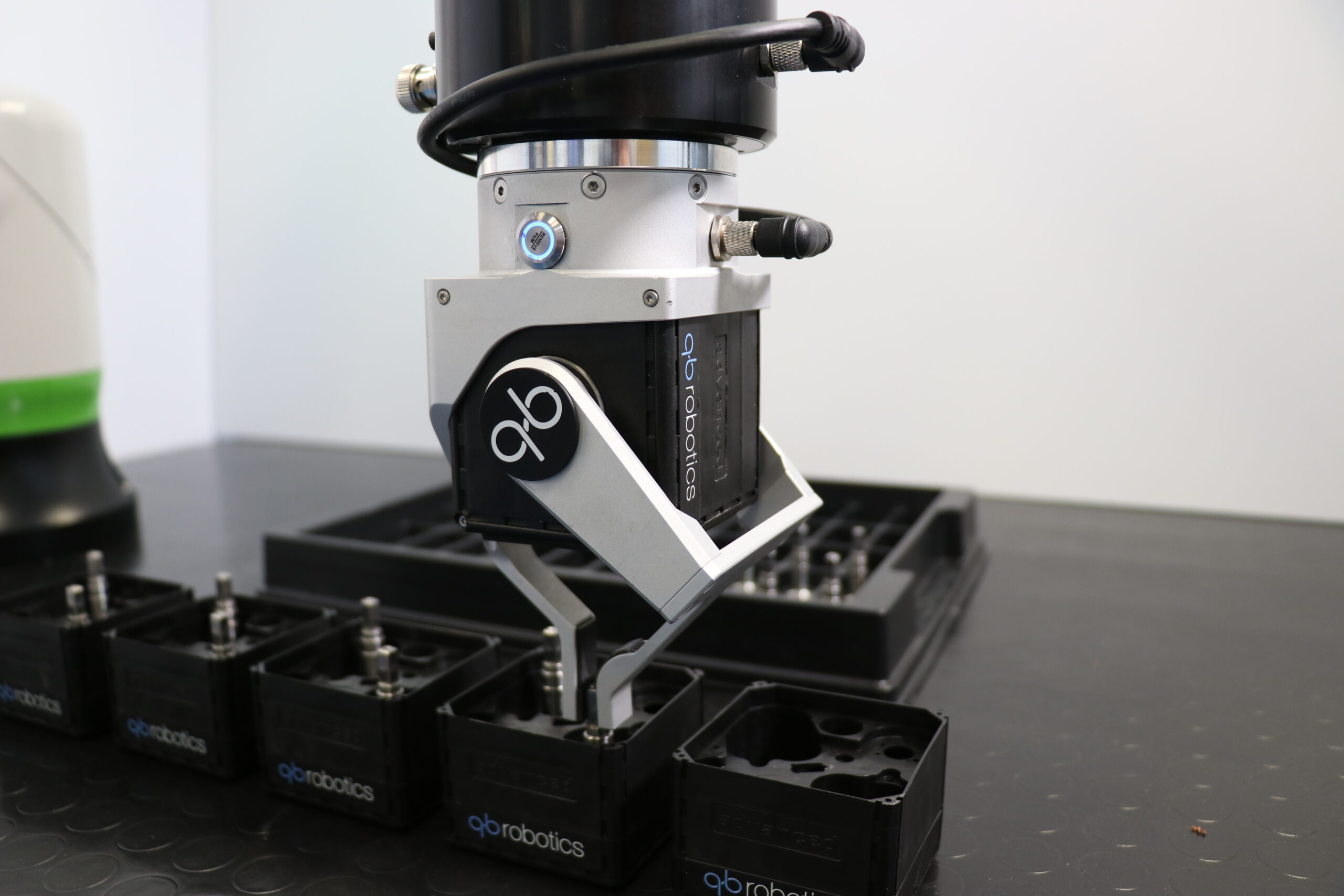





qbroboticas社開発したqbSoftClow 2指ロボットハンドは対象物に応じて、グリップの
力を変えられます。鉄球を落とさず持ち上げられる堅牢かつ精密な把持力、クリームパンを
潰さずに把持する繊細さを両立させます。
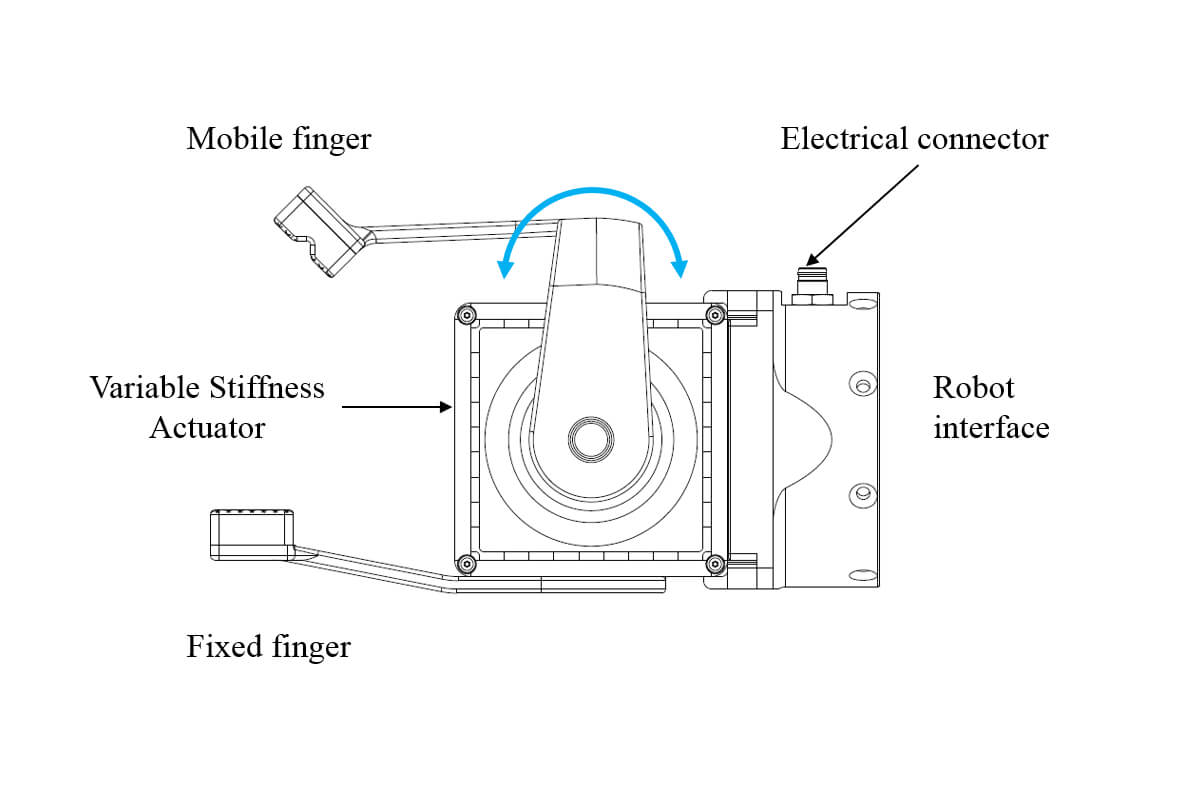
対象物が硬い物体の場合はStrong、柔らかい物体の場合はSoftと指定するだけで対象物の硬
さに応じてしっかりと正確にグリップすることを可能にします。
プラグアンドプレイで複雑なプログラミングをすることなく、ただSoft、Medium、Strong
の選択をするだけで使用できます。
| 特長 ・Soft/Medium/Strongの基本設定システム ・Advancedの詳細設定 ・耐荷重:3.7kg ・開閉時間:0.5秒 ・変更可能な硬さ ・大きいストローク ・カスタマイズ可能な指先 ・フォーストルク調整可能 ・ROS、ROS2 対応 |
対応ロボット
|
仕様
| 重量 | 860 g |
| 指の剛性 | 0.07 ~ 11.50 N/mm |
| 最大把持力 | 75 N |
| 最大荷重 | 5.0 kg |
| 開閉時間 | 0.5 秒 |
| ストローク | 45 ㎜ |
| たわみ | 0.6 ㎜ |
| X | Y | Z | |
| 重心 | -1.0 ㎜ | 1.0 ㎜ | 53 ㎜ |
| TCP | 0.0 ㎜ | 0.8 ㎜ | 142 ㎜ |
| 動作温度 | -5 ~ 50 ° |
| 保管温度 | -20 ~ 50 ° |
| ノイズレベル | 86 dB |
| 保護等級(IP) | 54 |
| 動作電圧 | 24 ± 0.8 V |
| 消費電力 | 3 ~ 22 W |
| 通信プロトコル | RS485、デジタル入力 |
| 通信項目 | たわみ、位置/剛性 |
| プラグアンドプレイ |
| ROS、ROS2パッケージ |
| 変更可能な把持剛性 |
| 適応性の高い把持 |
| 特殊タスク用の固定フィンガー |
| 取り外し及びカスタマイズ可能なフィンガー |
| ISO 12100 |
| ISO/TS 15066 |
| IEC 610000-6-2/6-4 |
| ISO 9409-1-50-4-M6 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.