![]()
![]()
![]()
![]()
![]()
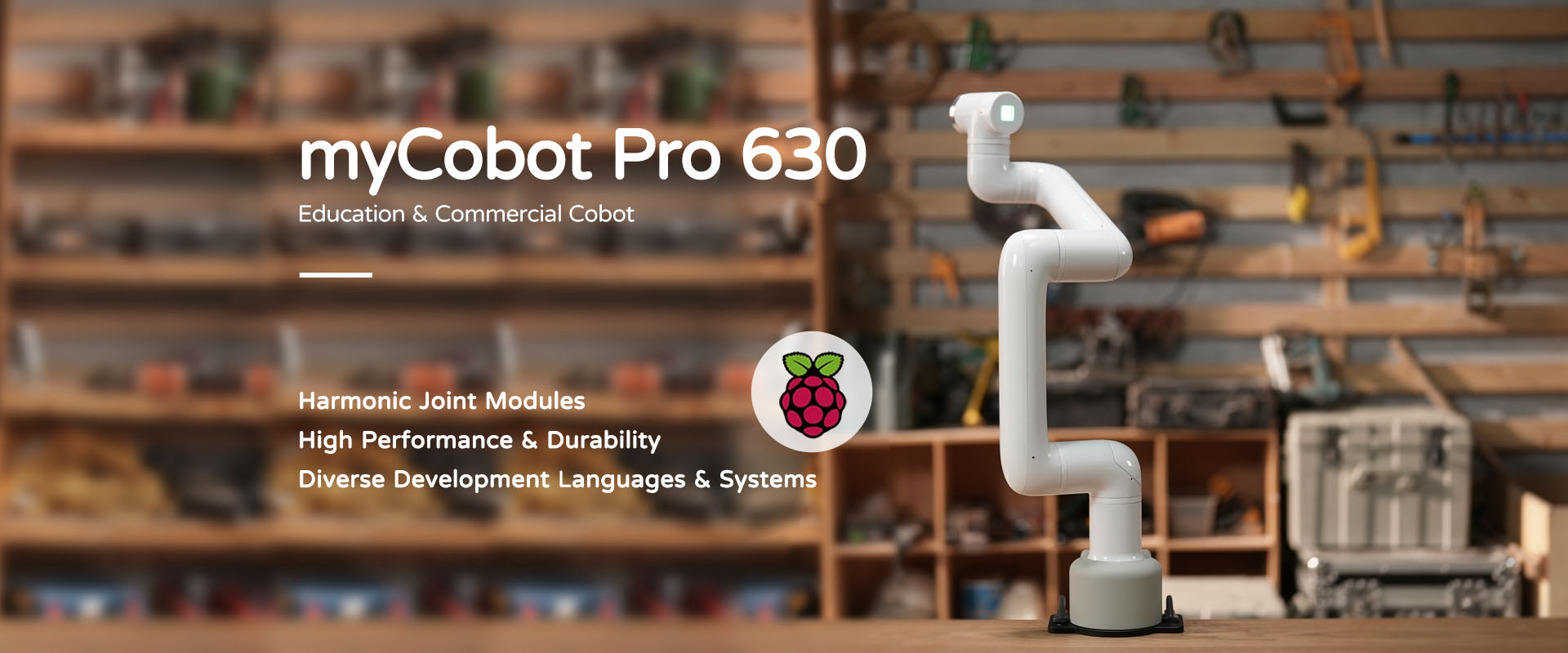
ElephantRobotics社製協働ロボットアーム
myCobot Pro 630

特徴
|
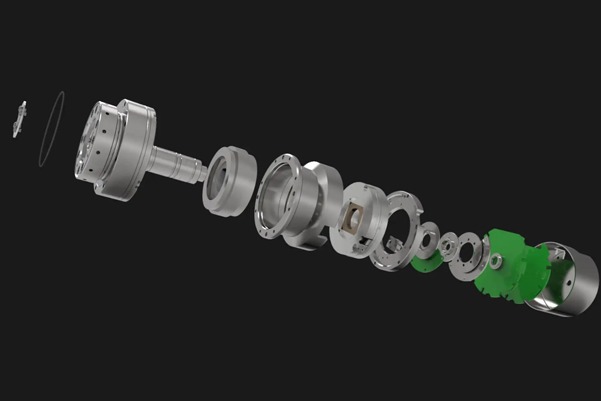
パワフルでユーザーフレンドリー |
|

|
デスクトップPCレベルのメインコントロール |
ElephantRobotics社のmyCobot Pro 630ロボットアームのペイロードは2000g、有効作業半径は630mmで、
教育、研究、および工業オートメーション向けに設計された協働ロボットです。コンパクトなデザインと強力な
機能で、イノベーションと学習のための無限の可能性を提供します。様々な難易度のプログラミング言語を
サポートしているため、あらゆるスキルレベルのユーザーに適しています。
また、Pythonをサポートし、IOやUSBなどのハードウェアインターフェースを備えているため、様々なセンサーや
アクチュエーターに簡単に接続できます。また、開発プロセスを簡素化するための豊富なオープンソースライブラリ
とAPIを提供し、Windows、Linux、MacOSと互換性があるため、さまざまな開発環境に適しています。
完全にオープンな制御インターフェース
このデバイスは、さまざまなハードウェア接続オプションを提供し、ユーザーに包括的かつターゲットを絞った
インターフェイスの選択肢を提供します。USB、EtherNet/IP、RS485、24V-I/O などのさまざまな周辺インター
フェイスをサポートし、ロボット アプリケーション開発のニーズをフルシーンでサポートします。
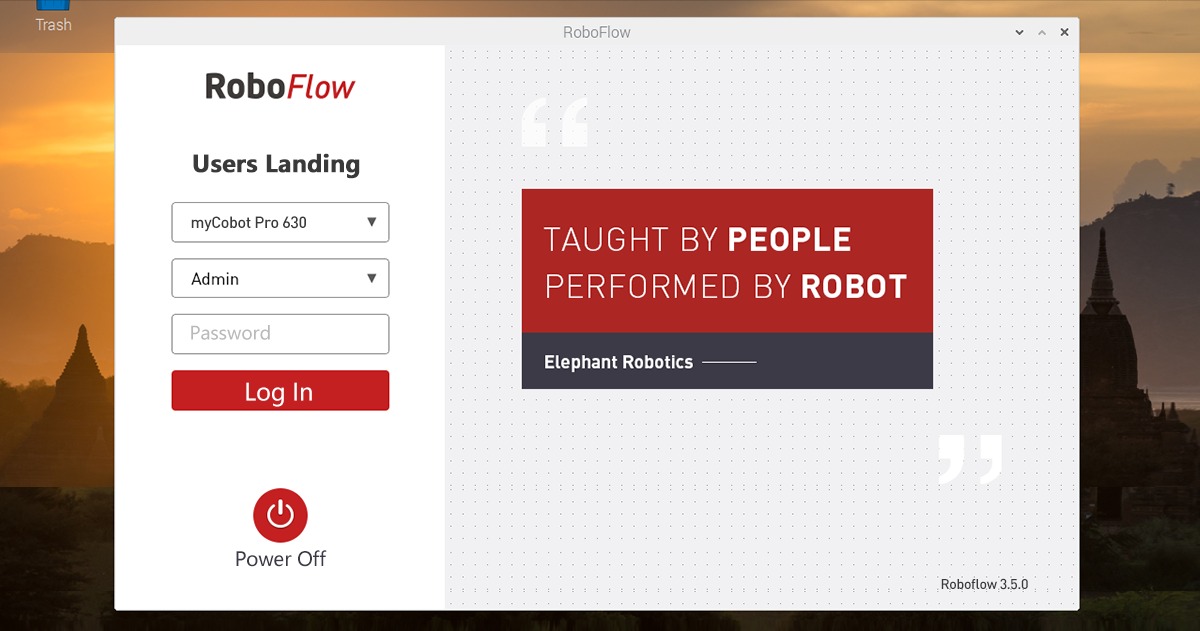
ROBOFLOW ビジュアル プログラミング ソフトウェア
RoboFlowはビジュアル プログラミング インタラクション、クイック ムーブメント コントロール、ドラッグ アンド
ティーチ、ロボット ステータス クエリ構成などの機能を備えたオールインワンのロボット プログラミング および
コントロール ソフトウェアです。Modbus、VNC、ソケットなどのさまざまな接続タイプをサポートし、ユーザーが
簡単にプログラミングしてロボットを迅速に適用できるようにします。
ROSシミュレーションソフトウェアのサポート
ROS1、ROS2、Gazebo シミュレーション環境のサポートが拡張され、オープンソースのロボット制御ドライバーが提供
されます。基本的な RVIZ および MoveIT の使用例が用意されており、統合アプリケーション シナリオのカスタマイズが
可能です。ロボットの3D および URDF ファイルもアクセス可能になり、ユーザーはより幅広いシミュレーションシステム
に適応できます。
主な使用例
|
形状認識による分類 |
画像認識による分類 |
|
ロボットによるペインティング |
無人搬送車+ロボットアーム |
様々なアクセサリーに対応
Elephant Robotics社ではロボットコラボレーションアプリケーションをターゲットに、
「my-series」製品ラインを展開、様々なアクセサリーを用意しています。

パートナー
Elephant Robotics社のロボットは世界中の様々な研究機関で採用されています。

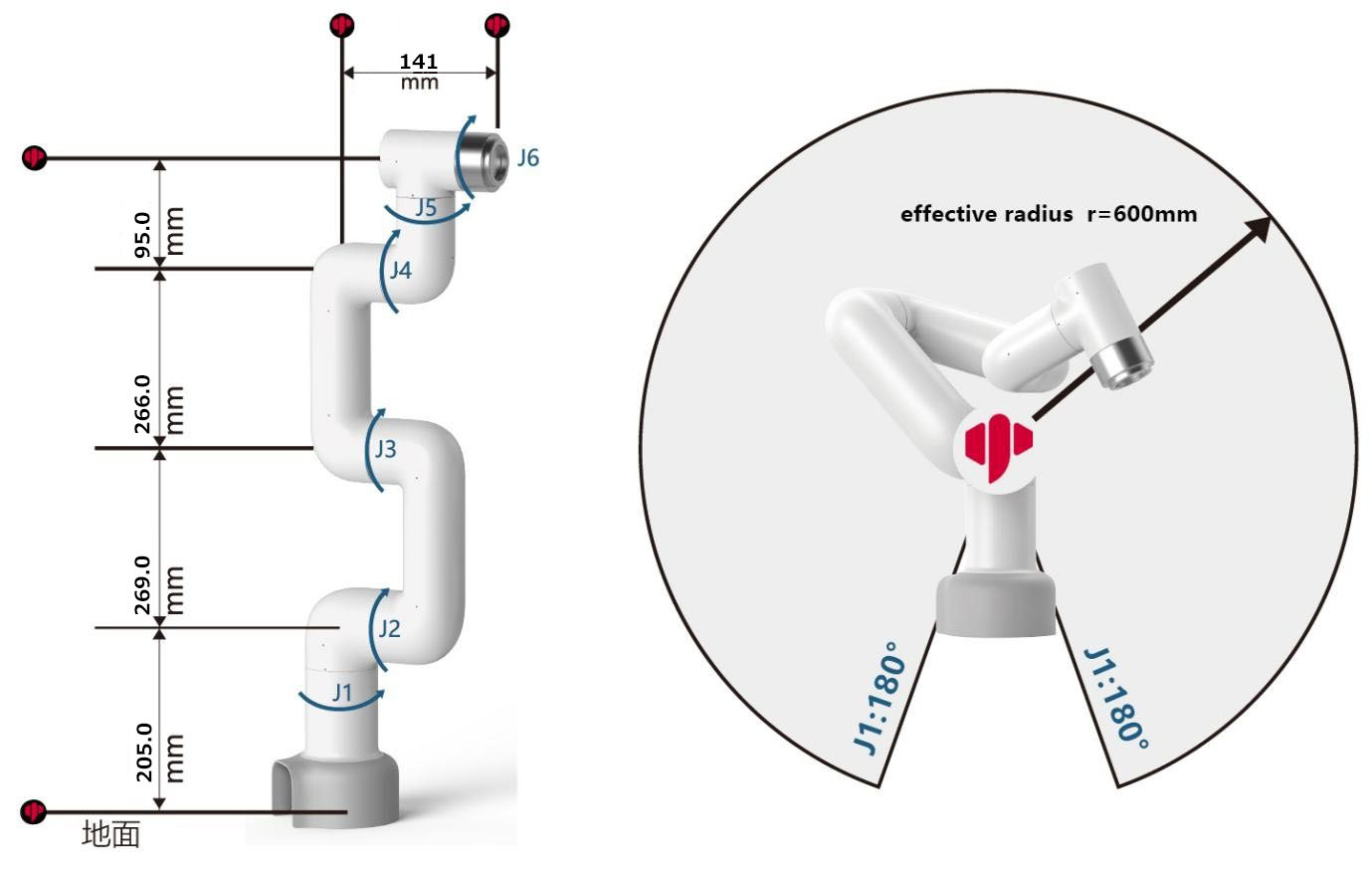
ワーキングレンジ
仕様
| 自由度 | 6 |
| 動作半径 | 630mm |
| ペイロード | 2000g |
| 反復精度 | ±0.1mm(標準) ISO 9283 |
| 作動寿命 | 10000時間 |
| 入力電圧 | DC 48V |
| 関節回転範囲 | J1:±360° J2:±135° J3:±135° J4:±150° J5:±360° J6:±360° |
| 開発OS | Windows Linux Mac |
| 通信プロトコル | TCP/IP-Socket MODBUS EtherNet/IP |
| プログラミング言語&ソフトウェア | ROS 1 ROS 2 myBlockly myStudio Matlab Python C++ |
| 接続 | WiFi-2.4G/5G BT-2.4G/5G USB 2.0 x2 USB 3.0 *2 RJ45 *1 RS 458 |
| ビデオ出力 | MicroHDMI x2 WirelessVNCサポート |
| ベース 出力電圧 | 24V 2A(最大) |
| ベース 入力 | 24V 50mA(最大) NPN x6 |
| ベース 出力 | 24V 50mA(最大) PNP x6 |
| ツール 出力電圧 | 24V 2A(最大) |
| ツール 入力 | 24V 50mA(最大) NPN x2 |
| ツール 出力 | 24V 50mA(最大) PNP x2 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.