![]()
![]()
![]()
![]()
![]()
Unitree社製4足歩行ロボット
ALIANGO
ビジョンセンサ搭載で、周辺環境を認識
疾走4足歩行ロボット
ALIANGO

・ 最大荷重 : 5-10kg
・ 最大傾斜角度 : 20°
・ 最高速度 : 1.5 - 2 m/s
・ トルクセンサ : 4
~ オプション ~
・ リアルタイム3次元マップ生成
及びナビゲーション機能
・ リアルタイムで周辺の障害物の認識
・ 人の姿勢の認識
・ 人の骨格の認識
・ ターゲット人物の追尾
・ 顔認証(開発中)

Depth Vision - 3Dマップリアルタイム生成及びナビゲーション機能
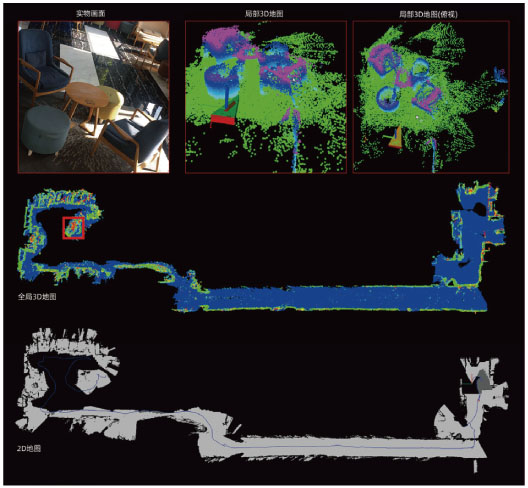
・ 3次元環境生成
ロボットは、ビジョンセンサ(カメラ)を使用して、周辺環境の
色の情報と深度の情報を収集してから、3次元の空間情報を構築
します。この処理は、特殊なビジョンアルゴリズムにより行われ
ます。
・ 予測地図
ビジュアルセンサを使用(カメラ)して、ロボットの周辺地図が
生成され、障害物のデータが提供されます。
・ ダイナミック障害物認識
ロボットが、移動する障害物に遭遇した場合、現在のマップデータ
を更新して、不要な情報を取り除きます。
・ グローバルポジショニング
地図の作成の際、グローバル及びローカルのリアルタイム
ポジショニング機能を実施します。
地図表示モジュールはカメラの見ている場所をリアルタイムで
認識し、ズームイン、ズームアウト、任意の回転等をサポート
します。
・ ループ検知
ロボットは、高いループバック精度を、多くのアプリケーションで提供する事が
でき、特定のレンジでの位置精度や、特定の振動率、ドリフトやロスの際に安定性を
提供出来ます。
人の姿勢及び顔認識
・ 人の姿勢認識
カラーカメラは、ロボットの視野の中にいる人の情報を収集する事ができ、ディープラーニングモデルを使用して
人の特定のジェスチャを認識する事が出来ます。これにより人とロボットのインタラクションを可能にします。
立ち上がる、しゃがむ、前進する、後進する、ツイストする等の動作をロボットが真似る事が出来ます。
・ 人の骨格認識
カメラの視野からの色情報から、ロボットは2次元の人の骨格情報を算出出来、更なる3次元の情報を深度を使用して
算出する事が出来ます。
それにより、ターゲットの動作情報を基に、3次元の骨格データを使用して、次の動作を予測する事が出来ます。
・ ターゲット人物のトラッキング
1人以上が同じ場面にいる場合、例えば左手を挙げる等、ロボットにある種の動作を教えると、ロボットはターゲット
をロックし、骨格情報を識別します。その後、ロボットはターゲットの位置を追尾し、リアルタイムでターゲットの
動作を認識する事が出来ます。
・ 顔認証及び外見判断(現在開発中)
ロボットの視野の中で、人工知能アルゴリズムにより、人の顔認証、混雑の判断、性別判断、年齢判断、服装等を
識別出来ます。
仕様
| 重量 | 約 19 kg |
| 寸法 (LxWxH):立位 | 650 x 310 x 600 mm |
| 寸法 (LxWxH):座位 | 450 x 310 x 250 mm |
| 耐荷重 | 5 - 10 kg |
| 歩行速度 | 1.5 - 2.0 m/秒 |
| 最大傾斜 | 20° |
| 駆動時間 | 2 - 4 時間 |
| 電池容量 | 10000 mAH*26V |
| 合計自由度 | 12 |
| 保護モード | 緊急停止、オーバーヒート、落下保護 |
| 警報システム | 電圧、温度、回路、充電警報 |
| RTOS | モーション制御 : Ubuntu 環境認識 : Ubuntu-ROS |
| モーション機能サポート | 1.平地を歩く 2.階段を上下に移動 3.落下してから回復 4.歩行・走行の定義 5.その他の歩き方の定義 |
| ビジュアル視野(オプション) | 1.マッピング、ポジショニング、ナビゲーション、 障害物回避の為のLiDar及産業用PCを搭載可能です。 2.物体・動作解析用、精度の高いマッピング用に 深度カメラを搭載出来ます。 |
ダウンロード
copyright (C) Nihon Binary Co., Ltd., All rights reserved.