![]()
![]()
![]()
![]()
![]()
Unitree社製4足歩行ロボット
A1

Unitree A1
すべてを可能にする敏捷性
特徴

優れた運動性能
信頼できる安定性
マルチアイ インテリジェント
デプスカメラ
リアルタイム HDビデオ伝送
特許取得済み動的システム
人物追尾機能
動的障害物回避
ビジュアル」SLAM
(Simultaneous Localization and Mapping)
リアルタイム HDビデオ伝送
二次開発
特徴
ペイロード
5 kg
2つの
リアルタイムOS
駆動時間
1 - 2.5 時間
3つの
保護機構
圧力センサ
より信頼性の高い、効率的で便利な
フットサポート情報への正確なアクセス
外部インターフェース
HDMI x 2、FE x 2、USB 30. x 4
モーター
・ 最大関節速度: 21 rad/s
・ 分解が簡単でメンテナンスが容易
・ 工業用クロスローラーベアリング:
長寿命軸方向への耐衝撃性
・ 全てのセンサーデータにアクセス可能
・ 位置、速度、トルク
各モーターごとに個別に設定可能
マルチアイ インテリジェント深度カメラ

・赤外線ステレオ深度テクノロジー
・1080P
・検出距離 0.3 ~ 10 m
・エラー率 < 2 % (2m以内)
高速走行性能 - 最高速度 3.3 m/s

・ 屋外での最高走行速度 3.3 m/s (11.88 km/h)
・ 中小型四足歩行ロボットとしては最も高速で高い安定性
(現在、MITがトレッドミルで達成した近似仕様の世界最速速度は3.7m/s)
・ 屋外での最高走行速度 3.3 m/s (11.88 km/h)
・ 3.3m/s の速度は大人のジョギングの速度と同等ですので、
ランニング等での同伴者としても最適です。
優れた運動安定性

・ 高度な動的バランスアルゴリズムにより、走行中に衝撃を
受けたり落下しても、すぐに最適なバランスをとることが
できます。
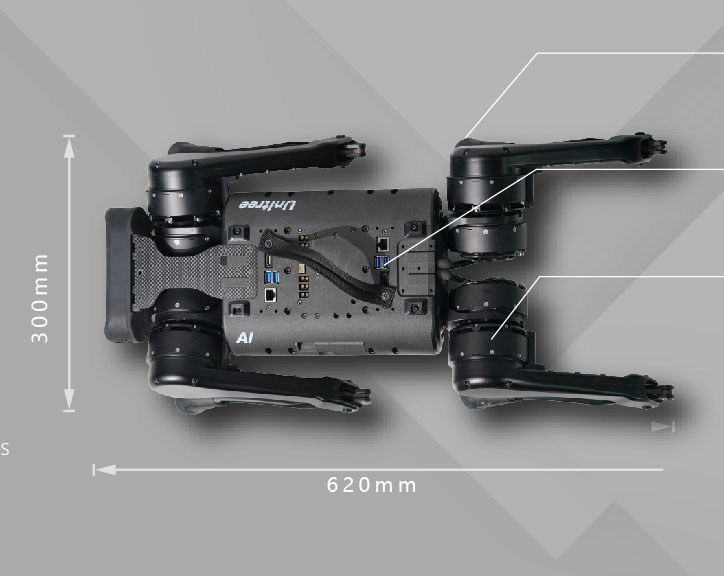
特許取得済みのボディ構造とレイアウトデザイン
・ 強度が高く、軽量なボディ構造で、メンテナンスが容易。
24V外部電源入力インターフェイスと5V、12V、19Vの
外部出力電源があり、各種拡張機器の外部接続に便利。
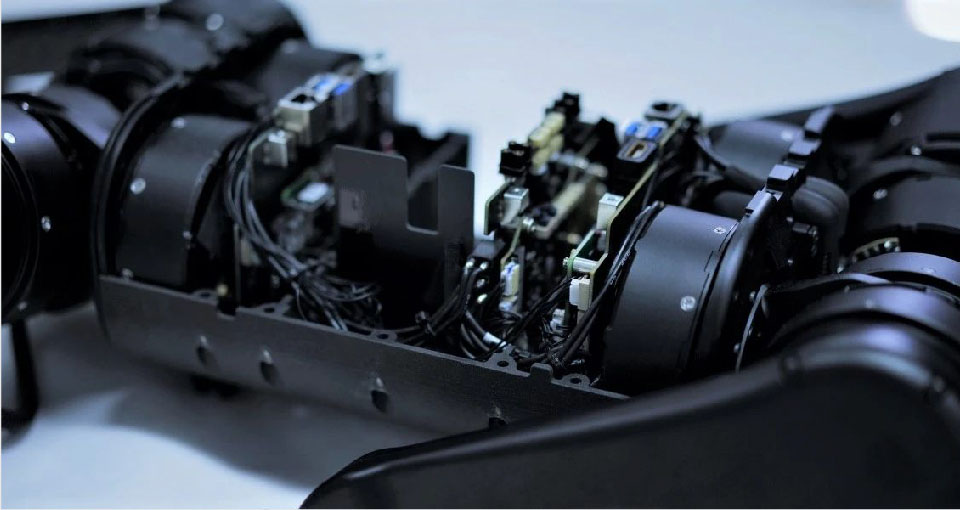
・ 高性能デュアルマスターコントロール(センシングマスター
コントロール、モーションマスターコントロール)を
標準装備。
・ 外部インターフェース:
USB3.0 x 4、HDMI x 2、Ethernetポート x 2
・ マスター制御をTX2等にアップグレード可能。
・ リアルセンス深度カメラを標準装備。地図の作成および
障害物回避機能を提供します。
特許取得済みのセンサー内蔵フットエンド

・ A1は各足先に力センサを内蔵。どんな動作状態でも
足の接触状態をリアルタイムで感知。
・ ジョイントモータの現在の知覚のみを用いて
エンコーダ誤差、慣性センサ誤差、伝送ギャップ誤差
などを推定する場合と比較して、より精度の高い計測を
行うことが可能。
・ プログラムでは、ハードウェアフォースセンサーと
モーターの電流情報が統合されており、感度と信頼性が
向上。
・ フットエンドは防塵防水で、簡単に交換可能。
自律的ターゲット追尾

・ 視覚範囲内のオブジェクト (人や特定の移動体) を
リアルタイムで追跡。
・ ターゲットの追跡機能のオンライン学習をサポート。
トラッキングのロバスト性に優れています。
・ ビデオストリームのリフレッシュレートは
25 ~ 30フレーム/秒に達します
・ トラッキングボックスの色により、トラッキング対象の
信頼度をリアルタイムに表示することができます。
(green(100%) ~ red(0%))
ビジョンベースの自律的障害物回避

・ ロボットの視角範囲0.8m以内の障害物を自律的に回避。
・ ロボットの視野範囲内にある障害物の分布をリアルタイムで
検出し、自分の位置を調整します。
・ ロボット本体の調整角度、視野範囲内の最大距離と面積、
歩行軌跡の範囲をリアルタイムで表示します。
高性能LiDARの組み込みを選択可能
・ マップの構築、自律的位置決定、ナビゲーション
プランニングおよび、動的な障害物回避をサポート


親しみやすいユーザーインターフェ―ス
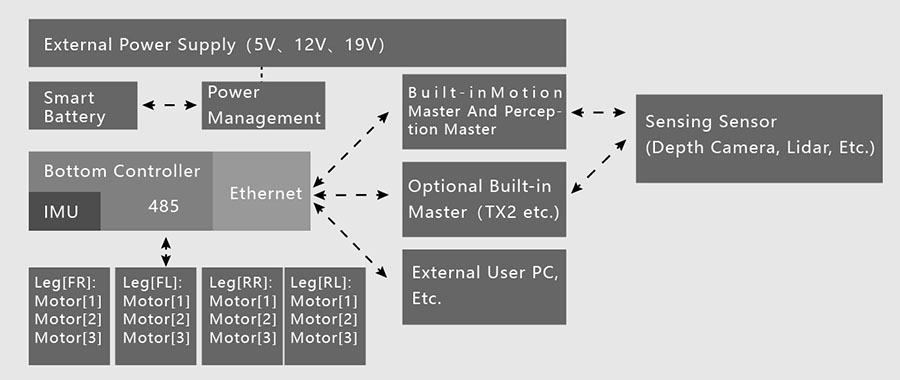
・ イーサネット経由でロボットに内蔵されているデュアル
メインコントロールとボトムコントローラに直接接続する
ことができ、視覚などのリアルタイムのデータ送信に
便利です。
・ 低レベルのコントロールへのアクセス - ロボットのすべて
のモーターとセンサーをリアルタイムで読み取り、制御
できます。
オープンソースのロボットアルゴリズムを直接使用する
のは簡単です。
・ 高レベルのコントロールへのアクセス - 前進、後退、左、
右などの高レベルの移動コマンドをロボットに直接送信
できます。
ソフトウェアとハードウェアの究極の信頼性

・Unitree社は4足歩行ロボットの分野で6年以上の専門的な
設計経験を持っています。
・ 2020年のCESでA1は約80回の後方宙返りのデモを
行いました。
・ 閉ループ宙返りアルゴリズムを用いて、モーションの
安定性を確保しています。
仕様
| 重量 | 約 12 kg |
| 寸法 (LxWxH):立位 | 500 x 300 x 400 mm |
| 寸法 (LxWxH):座位 | 450 x 300 x 150 mm |
| 歩行速度 | 3.3 m/秒 |
| 駆動時間 | 1 - 2.5 時間 |
| リアルタイムHDビデオ転送 | 遅延 0.1 - 0.2 秒 |
| 合計地涌度 | 12 DOF |
| 耐荷重 | 5 kg |
| 外部インターフェイス | HDMI x 2、Ethernet x 2、USB 3.0 x 4 |
| 保護 | 緊急停止、落下保護、オーバーヒート |
| 警告システム | 電源容量低下、ロボット温度、回路ショート、過電流 |
| リアルタイムOS | モーションコントロール : Ubuntu / 環境認識 : Ubuntu-ROS |
| 脚部フォースセンサ | フットサポート情報 |
| 電源出力 | 5V、12V、19V |

copyright (C) Nihon Binary Co., Ltd., All rights reserved.