![]()
![]()
![]()
![]()
ForceDimension 力覚応答ロボット遠隔操作システム

力覚応答による遠隔操作
危険作業や過酷環境下における省人化のためのロボットによる遠隔操作広く適用される中、操作用装置として力覚フィー
ドバック装置を使用することで、正確で安全な遠隔操作が可能となります。
ロボットの関節制限や動きの慣性力を作業者がその腕で感じることで、ロボットを的確に制御することができます。
あるいはロボットの干渉や不可を感知することで、ロボット本体や周囲環境への接触事故を回避することができます。
視覚のみでのロボット遠隔操作に力覚応答が加わることで、正確性や安全性の向上ばかりでなく、操作が格段に容易に
なり、作業者の負担を大幅に軽減します。
作業環境やsの内容、求められる作業品質などの条件に応じた理想的なロボット遠隔操作を実現するための、多様な力覚
提示装置を用いたシステムを提供します。
ForceDimension omegaシリーズ
Force Dimension社の力覚フィードバック装置はパラレルリンク方式により、優れた位置精度と剛性を実現、微妙な
力覚の表現、確かな反力応答が求められる遠隔操作やマイクロマニピュレーションといった用途に最適なシステム構築
を実現します。航空宇宙・医療・製造業など様々な分野で応用されています。
omega.3 |
omega.6 |
omega.7 |
||
| 自由度 | 3自由度 | 3自由度+3軸回転検出 | 3自由度+3軸回転検出+1軸把持 | |
| 力覚提示空間 | 並進 | φ160 mm x 110 mm | φ160 mm x 110 mm | φ160 mm x 110 mm |
| 回転 | - | 240 x 140 x 320° | 240 x 140 x 180° | |
| 把持 | - | - | 25 mm | |
| 最大提示反力 | 並進 | 12.0 N | 12.0 N | 12.0 N |
| 把持 | - | - | ± 8.0 N | |
| 位置分解能 | 並進 | < 0.01 mm | < 0.01 mm | < 0.01 mm |
| 回転 | - | 0.09° | 0.09° | |
| 把持 | - | - | 0.006 mm | |
| インターフェース | USB2.0 (リフレッシュレート 最大 4 KHz) |
|||
| プログラマブルボタン | 1 | 1 | 1 (Grasp) | |
| 電源 | 100-240V | |||
| 安全機構 | 速度監視、電磁ダンピング | |||
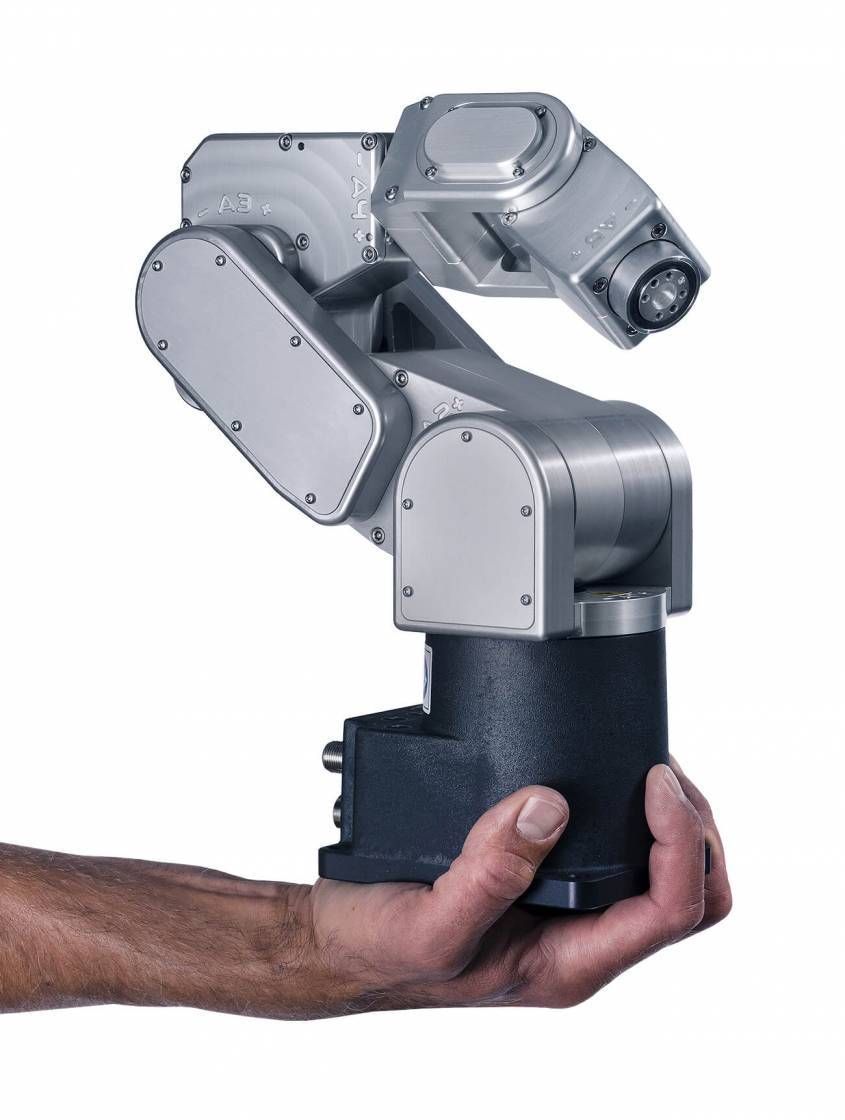
MECADEMIC MECA500
MECA500は、反復精度0.05㎜の超高精度を持つ、世界最小コンパクト6軸産業用ロボットです。
現代の技術で最高レベルのバックラッシュのない減速機と高分解能エンコーダを採用、完全アルミニウム製のアーム
筐体を始め、全ての構成部品がMecademic社の精密機械加工によって組立、検査されており、他に類のない最高精度
を実現しています。
| ・可搬重量 | 0.5 kg | ||
| ・反復精度 | 0.005 mm | ||
| ・最大リーチ(手首中心) | 260 mm | ||
| ・重量 | 4.5 kg | ||
| ・回転動作範囲 | - 関節 1 | -175° ~ +175° | |
| - 関節 2 | -70° ~ +90° | ||
| - 関節 3 | -135° ~ +70° | ||
| - 関節 4 | -170° ~ +170° | ||
| - 関節 5 | -115° ~ +115° | ||
| - 関節 6 | ±100 回転 | ||
| ・回転速度 | - 関節 1、2 | 150°/秒 | |
| - 関節 3 | 180°/秒 | ||
| - 関節 4、5 | 300°/秒 | ||
| - 関節 6 | 500°/秒 | ||
| ・ブレーキ | 関節 1、2 および 3 | ||
| ・取り付け方向 | 制限なし | ||
| ・安全モジュール | カテゴリー 3、PL d | ||
| ・電源 | (入力) | 90 ~ 264 VAC @50-60Hz | |
| (出力) | 24 VDC | ||
| ・通信 | Ethernet TCP、EtherCAT | ||
| ・コントローラ | ベース部に内蔵 | ||
| ・保護等級 | IP40 | ||
copyright (C) Nihon Binary Co., Ltd., All rights reserved.