![]()
![]()
![]()
![]()
TESOLLO社製 多自由度5指ロボットハンド
DG-5F-M
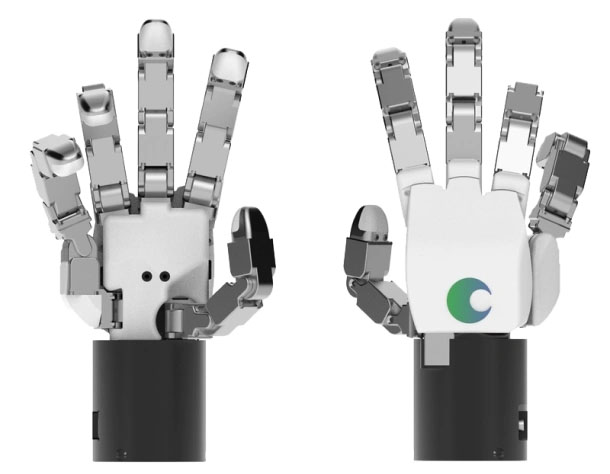
DG-5F-M
人間レベルの把持と操作が可能なロボットハンド
DG-5F-Mは、完全駆動式の5本指ロボットハンドで、20自由度(DoF)を
備え、人間のような高度な操作性を実現します。
独立した関節制御と人間の手をモデルにした設計により、DG-5Fは研究、
産業、サービスロボット分野において、直感的なツール操作と精密な
ハンドリングを可能にします。
主な特徴
1.独立関節制御
20個の関節すべてが独立して駆動するため、複雑な手の動きや、高度な作業における精密かつ協調的な操作が可能です。
2.人間のようなデザイン
成人男性の手のサイズと比率をモデルにしたDG-5Fは、人間中心の環境に最適化されています。
ツール、デバイス、そして人間中心の作業空間との直感的なインタラクションを実現します。
3.多彩なグリップモード
様々なグリップパターンに対応しています。例えば、ピンチグリップ(指先で掴む)、
パワーグリップ(両手でしっかりと握る)、プレシジョングリップ(指の一部を使って握る)などがあります。
グリップ動作は、対象物のサイズ、形状、重量に応じて適応します。
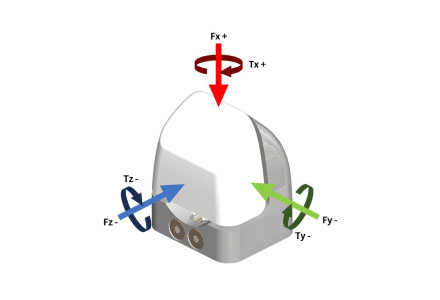
4.高度なセンサー統合(オプション)
オプションの高精度力覚センサーを指先に搭載することで、リアルタイムの触覚フィードバックが可能になります。
滑り検知、適応型力制御、動的な作業における環境とのインタラクションなどの機能を提供します。
5.堅牢な素材と耐久性
高強度かつ軽量な素材を採用し、高サイクル・高速動作においても堅牢な性能を発揮します。産業用途および
研究用途の両方に適しています。
6.柔軟なプログラミングと統合
ROS2に完全対応したユーザーフレンドリーな制御インターフェースを搭載し、既存のロボットプラットフォーム、
シミュレータ、制御システムとのシームレスな統合を実現します。
7.多様なアプリケーション
研究開発:AIベースのマニピュレーション研究、人間とロボットのインタラクション、巧みな制御研究
産業オートメーション:精密組立、機器の操作、物流処理
サービスロボティクス:人間支援作業、遠隔操作、人間環境における物体とのインタラクション
応用例
 ヒューマノイドロボット研究 高度な操作能力を持つヒューマノイドロボットの研究開発に最適です。 |  インハンド操作タスク 物体の組立やコネクタの締結など、精密な操作を必要とするプロセスに適しています。 |  ツール利用および双腕タスク ツールの使用と双腕による協調動作を伴うタスクに最適です。 |
オプション
 指先センサー (6軸F/Tセンサー) | 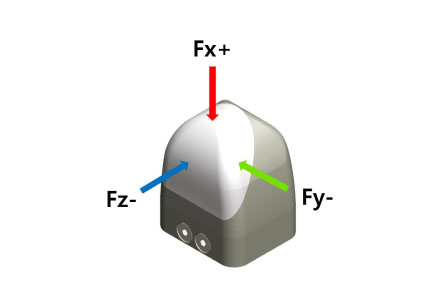 指先センサー (3軸F/Tセンサー) | 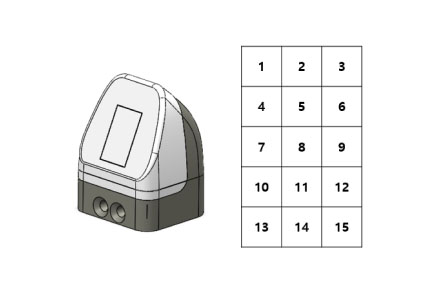 指先センサー (触覚センサー) | |||
 ショートリストバージョン | 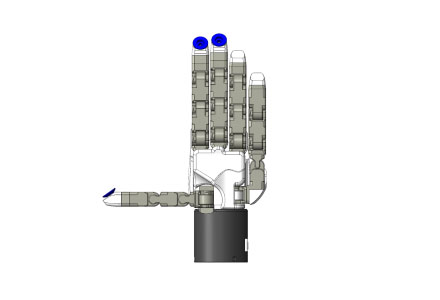 吸着型フィンガー |  グリッパー取付スタンド |
仕様
| 電源 | 24V |
| 消費電力 | 最大 10A |
| 通信方式 | Modbus(RTU,TCP)、EtherNet(TCP/IP) |
| 制御周波数 | 250Hz |
| エンコーダ | アブソリュートエンコーダ |
| 自由度 | 20 DoF(指1本あたり4 DoF) |
| ピンチ把持重量 | 定格:2.5kg / 最大:5kg |
| 包み込み把持重量 | 定格:10kg / 最大:20kg |
| 本体重量 | 1,763g |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.