![]()
![]()
![]()
![]()
TESOLLO社製 多自由度4指グリッパー
DG-4F

DG-4F
ヒューマノイドハンド構造と適応的把持機能を組み合わせたグリッパー
DG-4Fは、ヒューマノイドハンドの適応構造と標準グリッパーの
機能的効率性を組み合わせた多用途の4本指ロボットグリッパーです。
左手、右手、パラレルグリッパーの役割を1つのユニットに統合し、
形状適応性と様々な環境での柔軟な動作を提供します。
主な特徴
1.革新的な把持メカニズム
手のような器用さとグリッパー機能を組み合わせた4本指構造で、シンプルかつ効果的な把持動作を実現
2.高効率関節設計
18個の関節を使用し、耐久性と機械的信頼性を向上、シンプルな構造により、容易なメンテナンスと低い故障率を実現
3.適応的把持能力
様々な物体のサイズや形状に柔軟に対応し、円筒形、平面、不規則な表面なども安定したハンドリング
4.耐久性と堅牢な構造
反復使用や物理的ストレスに耐えるよう設計され、産業環境での長期展開に適している
5.複数の把持モード対応 (把持モードは物体の特性に応じて調整)
ピンチグリップ - 指先での把持
パワーグリップ - 手全体での把持
精密グリップ - 指の一部を使用した制御された把持
6.柔軟なシステム統合
様々なロボットアームと互換性あり シームレスな統合のためのユーザーフレンドリーな制御インターフェースを提供
7.応用例
産業用途: 物体ハンドリング、組立ライン、物流オートメーション
研究開発: ロボット操作および把持制御の研究
教育用途: 学術環境におけるロボティクスおよびオートメーション教育
応用例
 製造および物流自動化プロセス |  ロボティクスおよびAI研究 |  ツール操作および コンポーネント把持タスク |
オプション
 指先センサー (6軸F/Tセンサー) |  指先センサー (3軸F/Tセンサー) |  指先センサー (触覚センサー) | 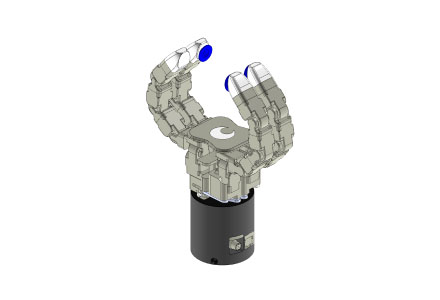 吸着型フィンガー | グリッパー取付スタンド |
仕様
| 電源 | 24V |
| 消費電力 | 最大 10A |
| 通信方式 | Modbus(RTU,TCP)、EtherNet(TCP/IP) |
| 制御周波数 | 333Hz |
| エンコーダ | アブソリュートエンコーダ |
| 自由度 | 18 DoF |
| ピンチ把持重量 | 定格:3kg / 最大:5kg |
| 包み込み把持重量 | 定格:10kg / 最大:20kg |
| 本体重量 | 1,494g |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.