![]()
![]()
![]()
![]()
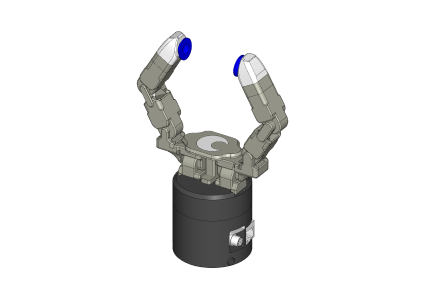
TESOLLO社製 多関節 6 DoF 2指グリッパー
DG-2F

DG-2F
さまざまな物体を精密に把持する多関節2本指グリッパー
DG-2Fは、比較的単純でありながら高度な把持作業を想定して設計
されており、ピンチ機構を用いて最大4kgまでの物体を安定して
把持することができます。
6自由度(6 DoF)構造を採用しているため、多様な形状の物体に対
応可能で、産業現場での使用に最適です。
主な特徴
1.精密把持性能
ピンチング方式とエンベロープ方式の両方の把持方法に対応しており、小型部品から中型のワークピースまで、
対象物を安定して把持することができます。
ピンチング方式では最大4kgまでの対象物を精密に制御し、高頻度の反復作業においても一貫した性能を維持します。
2.6自由度による柔軟な動き
各指は3自由度(合計6自由度)を備えており、さまざまな物体の形状に能動的に適応します。
狭い場所での把持や、不規則な形状の物体の取り扱いにおいて、優れた適応性を発揮します。
3.産業環境向けに最適化
BLDCモーターとアブソリュートエンコーダを採用し、耐久性と信頼性の高い動作を実現しているため、
製造、物流、組立、検査などの高信頼性が求められる用途に適しています。
4.モジュール式通信 & 制御の互換性
Modbus(RTU、TCP)およびEthernet(TCP/IP)プロトコルに対応しており、さまざまな産業用ロボットや
制御システムとの連携が容易です。
5.オプションによる拡張性
各指先にF/Tセンサーを取り付けることで、フォースフィードバック方式による制御が可能となり、
精密組立工程での活用が可能になります。
応用例
 電子部品組立・検査 PCB、コネクター、モジュールなどの繊細な部品を確実に取り扱います。 |
 精密加工 マシンテンディング CNC機械、レーザーシステム、3Dプリンターの部品の自動ロード・アンロード。 |
 物流・包装 さまざまな形状の製品を高速かつ柔軟に仕分け・梱包 |
 研究・教育用 ロボットシステム 把持アルゴリズムのテストや、ヒューマノイドおよび協働ロボット研究のプラットフォームとして最適。 |
オプション
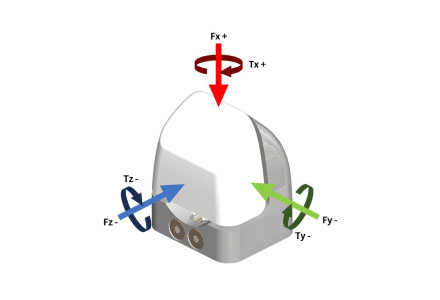 指先センサー (6軸F/Tセンサー) | 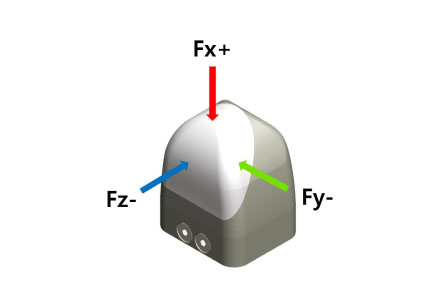 指先センサー (3軸F/Tセンサー) |  指先センサー (触覚センサー) | |||
 吸着型フィンガー | 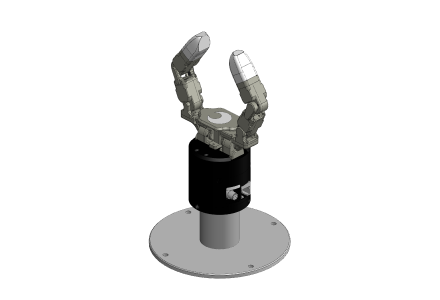 グリッパー取付スタンド |
仕様
| 電源 | 24V |
| 消費電力 | 最大 10A |
| 通信方式 | Modbus(RTU,TCP)、EtherNet(TCP/IP) |
| 制御周波数 | 500Hz |
| エンコーダ | アブソリュートエンコーダ |
| 自由度 | 6 DoF(指ごとの3 DoF) |
| ピンチ把持重量 | 定格:2kg / 最大:4kg |
| 包み込み把持重量 | 定格:5kg / 最大:10kg |
| 本体重量 | 770g |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.