![]()
![]()
![]()
![]()
hello robot™社製 モバイルマニピュレータ
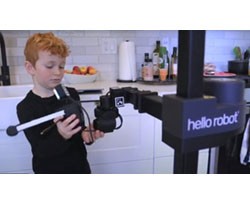
![]() STRETCH 3
STRETCH 3
フレンドリーでオープン、そして器用

● 上下移動と伸縮するアームをコンパクトなモバイルベースに統合
- 上下可動域 110 cm、アーム伸長 51 cm
● 柔軟把持グリッパーと各種センサーを標準装備
グリッパーにピッチとロールの自由度を追加する
「Dex Wrist」を標準搭載
グリッパーに深度カメラ RealSense D405 を搭載
● 自律移動ロボット開発用コードの提供(Python、ROS2)
● アーム先端部とベース部に豊富な拡張ポート
特長
 ・器用さの向上
DexWrist 3付属 |
 ・知覚の向上
インテルD405グリッパー上のRGBカメラ |
 ・改良されたソフトウェア
ROS2 HumbleがUbuntu 22.04に完全対応 |
 ・Web Teleop
プリインストールされたアクセシブルな |
 ・エンボディードAIサポート
外部GPUのサポート |
 ・より堅牢で使いやすく
より堅牢になったエレクトロニクス |
強化されたソフトウェア
・ROS 2 (Humble) 公式サポート
ROS 2が標準で付属しています。
開発をシンプルかつ迅速に
新規設計された Stretch Web Interface が付属。新しいグリッパー深度カメラとヘッドナビゲーションカメラを
活用することで、Stretchは箱から出してすぐに「どこからでも操作」できるようになりました。
Meta OVMMとのコラボレーションにより、Stretch 3にはリファレンスコード(およびWiFiアクセスポイントアクセサリ)が含まれており、
リモートGPUで大規模モデルを実行するプロセスを簡素化します。
同時に2台のSTREACH3を遠隔操作するためのサンプルコードが付属。ロボットをリアルタイムで操作し、複雑なデータ収集を実現します。
Stretch 3はROS2 Nav2をサポートし、ナビゲーション性能を向上させます!
チュートリアルとドキュメントをリファクタリング、新規ユーザーでも簡単に理解できるようにしました。
・コミュニティフォーラム(英語)
・ハローロボット GitHub(英語)Stretch ドキュメント(英語)
・Stretch ドキュメント(英語)
衝突回避システムをアップデート、障害物に衝突する前に迅速かつ確実に安全に停止できるようにしました。
Simply Useful™モバイルマニピュレータ―
 Stretch Compliant Gripperは、軽量でシンプルな構造ながら極めて
Stretch Compliant Gripperは、軽量でシンプルな構造ながら極めて深度カメラ
 生産現場でのロボットによる自動化の可動範囲の大きいパン/チルトベースに
生産現場でのロボットによる自動化の可動範囲の大きいパン/チルトベースに伸縮アーム
 上下移動と伸縮するアームにはすべての関節にトルクセンサーを備えており、
上下移動と伸縮するアームにはすべての関節にトルクセンサーを備えており、IMU・加速度計
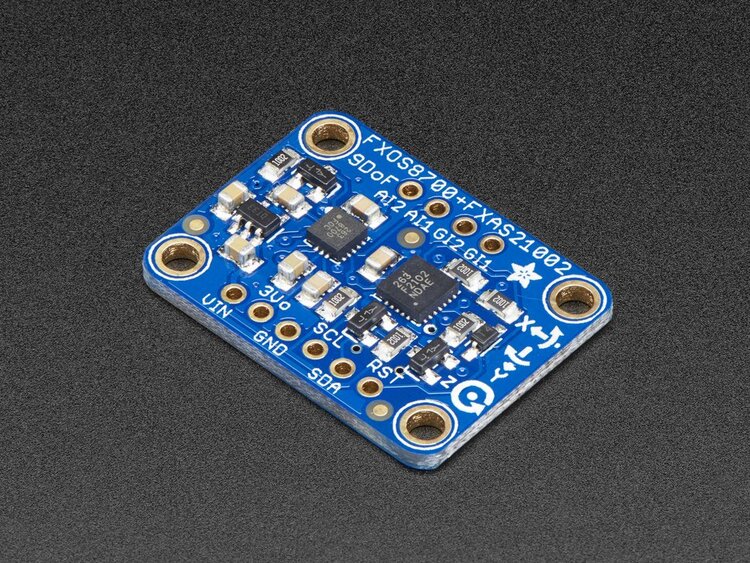 ベース部に組み込まれた9DOF IMUは走行距離計測、凹凸や傾斜の検出に用いられ、
ベース部に組み込まれた9DOF IMUは走行距離計測、凹凸や傾斜の検出に用いられ、レーザー距離計
 走行ベースにはRP-Lidar A1が組み込まれています。
走行ベースにはRP-Lidar A1が組み込まれています。マイクロフォンアレイ
 ReSpeaker V2マイクロフォンアレイをヘッド部に内蔵、ROSを用いた音声
ReSpeaker V2マイクロフォンアレイをヘッド部に内蔵、ROSを用いた音声STRETCH RE1 仕様
| 可搬重量 | 2 kg (グリッパーを含む) |
| 重量 | 24.5 kg |
| 寸法 | 33 x 34 x 141 cm |
| 連続稼働時間 | 2 ~ 5 時間 |
| 上下可動域 | 110 ㎝ |
| アーム伸縮長 | 51 cm |
| 可搬重量(リフト) | 5 ㎏ |
| 可搬重量(アーム) | 3 ㎏ |
| アーム昇降速度 | 15 ㎝/s |
| アーム伸縮速度 | 30 ㎝/s |
| 開発用ポート | Yes |
| マウントポート | Yes |
| キャリブレーション | Yes |
| サイズ | 33 ㎝(W) x 34 ㎝(L) |
| 最高速度 | 30 cm/s |
| 可搬重量 | 10 ㎏ |
| IMU | BNO085 9-axis |
| レーザー距離計 | Slamtex RPLidar A1 (340°視野角) |
| クリアランス | 床面から2.5 ㎝ |
| 最大閾値 | 1 ㎝ |
| 充電ポート | Yes |
| 内蔵電源 | Yes |
| 内蔵コンピュータ | Yes |
| 開発用ポート | Yes |
| マウントポート | Yes |
| キャリブレーション | Yes |
| 内蔵コンピュータ | NUC-12 |
| CPU | Intel i5-1240P |
| ストレージ | SSD 512GB |
| メモリ | 16 GB / DDR4-3200 |
| WiFiアクセスポイント(オプション) | Netgear Nighthawk XR1000 |
| 電源 | 12 VDC |
| バッテリー持続時間 | 低速動作時 5 時間 / 高速動作時 2 時間 |
| 認証 | FCC クラスA (CE pending) |
| 電圧メーター | RGBライトバー |
| バッテリー | SLA ディープサイクルバッテリー |
| バッテリー容量 | 18 Ah |
| ヘッド可動範囲 | 旋回 336°/ 上下 115° |
| ナビゲーションカメラ | Arducam B0385 1MP (グローバルシャッター、FOV 140°) |
| 深度カメラ | Intel RealSense D435if (IMUおよびIRフィルター内蔵) |
| オーディオ入力 | ReSpeaker 4ch MicArray V2 |
| オーディオ出力 | 8W ステレオ |
| ボリューム調整 | Yes |
| 照明付きランストップ | Yes |
| 開発用ポート | Yes |
| マウントポート | Yes |
| 可搬重量 | 最大 2.5 kg |
| 制御バス | Dynamixel TTL / 12V |
| 手首可動域 | Yaw 330° / Pitch 150° / Roll 345° |
| クイックコネクトマウント | Yes |
| キャリブレーション | Yes |
| ボリューム調整 | Yes |
| リング状LED照明 | Yes |
| 開発用ポート | Yes |
| マウントポート | Yes |
| 深度カメラ | Realsense D405 |
| 制御バス | Dynamixel TTL / 12V |
| グリップ開閉幅 | 15 ㎝ |
| 把持重量 | 最大 2 kg |
| クイックコネクト対応 | Yes |
| 握り込み | Yes |
| ピンチ | Yes |
| キャリブレーション | Yes |
| ヘッド | M4 threaded mounts x3 |
| USB 2.0 Type A | |
| 12V@3A 出力 | |
| ショルダー | M3 threaded mounts x3 |
| USB 2.0 Type A | |
| 12V@3A 出力 | |
| ベース | HDMI |
| イーサネット | |
| USB 3.0 Type A x4 | |
| 12V@6A 出力 | |
| 手首 | M3 threaded mounts x2 |
| USB 2.0 Type A x4 | |
| Arduino DIO / Serial / SPI / I2C | |
| 12V@500mA 出力 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.