![]()
![]()
![]()
![]()

Universal Robot e-シリーズ内蔵フォーストルクセンサーを直感的に操作
Robotiq Force Copilot
・複雑な作業も簡単な方法でプログラミング。
・力覚を利用するアプリケーションを可能に。
・ロボットセルの信頼性とフレキシビリティの向上。
・力覚センサの潜在的機能を最大限に活用。
・力の制御をすぐにマスター。
特長
Force Copilotは、e-series内蔵のフォーストルクセンサーデータと次の機能を用いて
複雑な力覚アプリケーションを数分でプログラムします。
 |
・ActiveDriveツールバー ・経路記録ノード ・ゼロFTセンサーノード ・挿入ノード ・表面検出ノード ・力制御ノード ・フォースイベントノード ・衝突検出ノード ・マルチポイントパスノード |
アプリケーション
Force Copilotは、Universal Robot e-シリーズ内蔵フォーストルクセンサーを直感的に操作できるソフトウェアです。
複雑なロボットの動きも数分でプログラミング可能で、ロボティクスの専門知識は必要ありません。
結果得られるものは、強くてフレキシブルなロボットセルです。
 |
 |
 |
 |
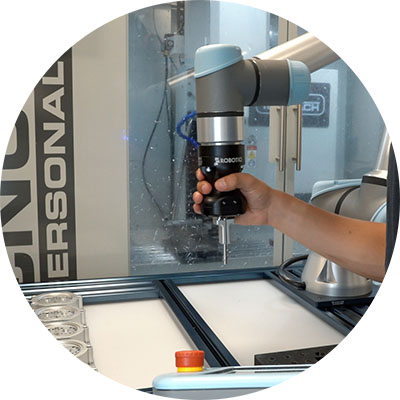
| ピック&プレース | 品質検査 | 組み立て | マシンテンディング |
統合しやすく、使いやすい
Universal Robot e-シリーズでは、Force Copilotは、内蔵フォーストルクセンサーデータを使用し、高感度の力覚制御が
必要なアプリケーションを実行します。URCapソフトウェアを保護するため、ライセンス用ドングルが使用されています。
CBシリーズでは、Finishing Copilotは、Robotiq FT 300に含まれています。
 |
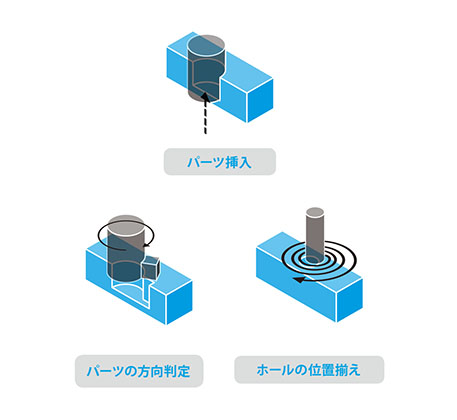
複雑な作業も簡単な方法でプログラミング 力の制御を容易にします。 作業のパラメータを入力、再生を押して、 アプリケーションを実行します。 |
| 精度と再現性の向上 センサをForce Copilotと組み合わせることで、 ロボットの器用さを向上させます。 組み立て、挿入、ピックアンドプレイスや マシンテンディングのアプリケーションにおける フレキシビリティとロバスト性を増大させます。 |
 |
 |
把持とビジョン機能を使って さらに多くのアプリケーションを可能に 簡単に統合できるWrist CameraとAdaptive Gripperが あれば、Wrist Cameraで適切なパーツを検出し、 Gripperでパーツを挿入できます。 |
| 精度と再現性の向上 センサをForce Copilotと組み合わせることで、 ロボットの器用さを向上させます。 組み立て、挿入、ピックアンドプレイスや マシンテンディングのアプリケーションに おけるフレキシビリティとロバスト性を増大させます。 |
 |
 |
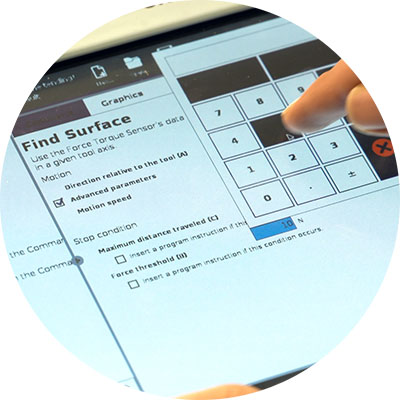
複雑な作業も簡単な方法でプログラミング 力の制御を容易にします。作業のパラメータを入力、 再生を押して、アプリケーションを実行します。 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.