![]()
![]()
![]()
![]()
![]()
オープンプラットフォーム ヒューマノイドロボット
ROBOTIS-OP2

ROBOTIS-OP2は、先端の演算能力、多種多機能センサ類、 高トルク出力、およびダイナミックな動作が特徴の 研究・教育用プラットフォームです。 オープンソースで公開されているモーションプログラムを 誰でもすぐに動作させる事ができます。 |
|
ROBOTIS-OP2 ヒューマノイドロボットは、米国NSF(全米科学財団)の資金を得て、韓国ROBOTIS社の技術供与によって、 バージニア工科大学、パデュー大学、およびペンシルバニア大学によって共同開発されました。 |
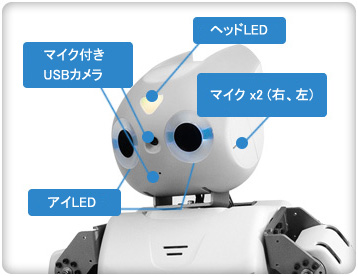
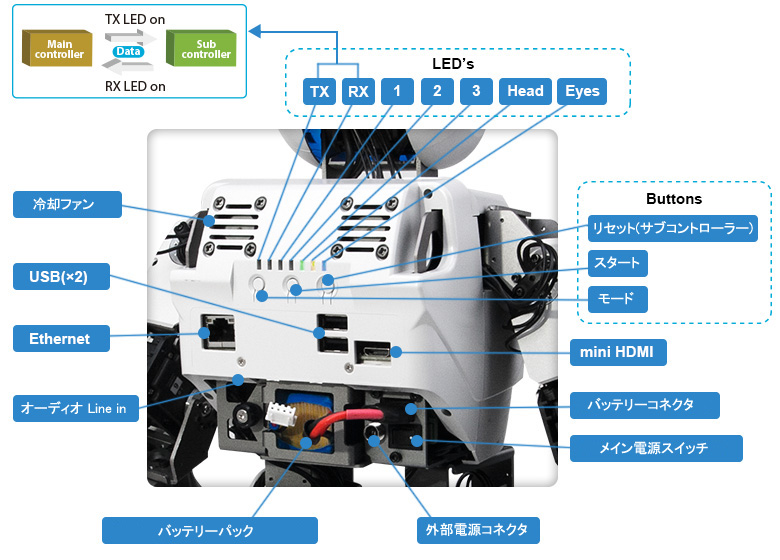
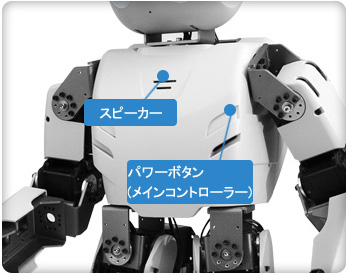
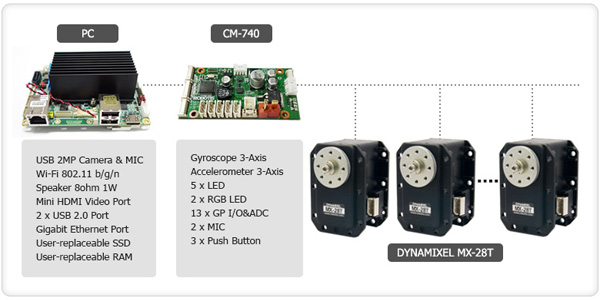
多種のセンサと豊富なインターフェイスを実装
 |
 (クリックで拡大します) |
 |
仕様
| 身長: | 454.5mm |
| 体重: | 2.9kg |
| 歩行速度: | 24.0cm/秒、0.25秒/ステップ(可変) |
| 起立速度: | 2.8秒(床面上うつ伏せ状態から)/ 3.9秒(床面上仰向け状態から) |
| 自由度: | 20 DOF( 6DOF(脚部)×2、3 DOF(腕部)×2、2 DOF(頭部)×1 ) |
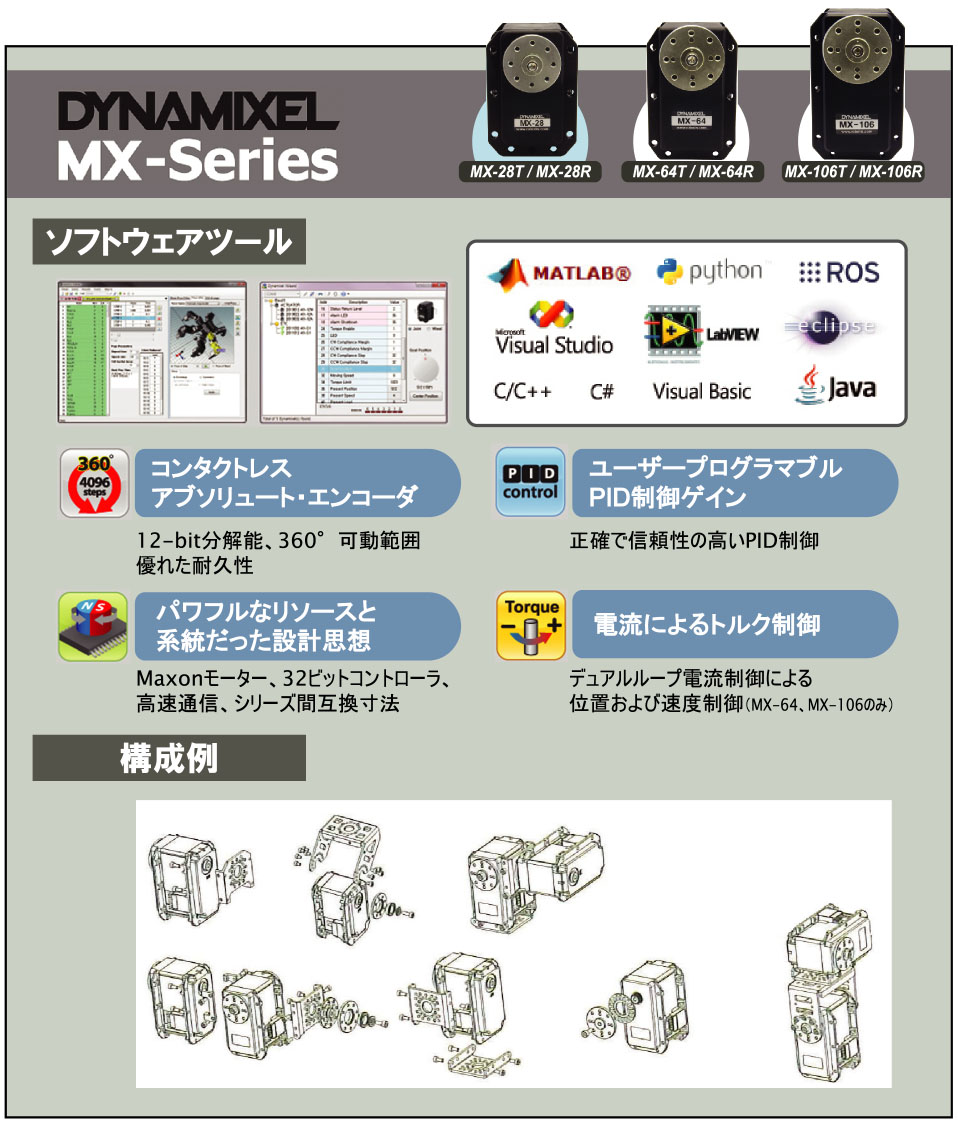
| アクチュエータ: | DYNAMIXEL MX-28T × 20個 |
| センサ: | 3軸ジャイロセンサ、3軸加速度センサ |
| AV入出力: | HDカメラ(USB)、HDMI、マイク(USB)、Line In/Out、スピーカー |
| 内蔵PC: | Intel Atom N2600プロセッサ 1.6GHz Dual Core 4GBRAM、ストレージ 32GB |
| コントローラ: (CM-730) |
ARM CortexM3 STM32F103RE 72MHz |
| 関節制御: | 4.5Mbps 高速DYNAMIXELバス |
| インターフェイス: | Gigabit Ethernet、WiFi、USB |
| 電源: | バッテリー(連続駆動時間 30分)、および100~200VAC 50/60Hz(電源アダプター付属) |
拡張性と汎用性に優れたモジュラー構成
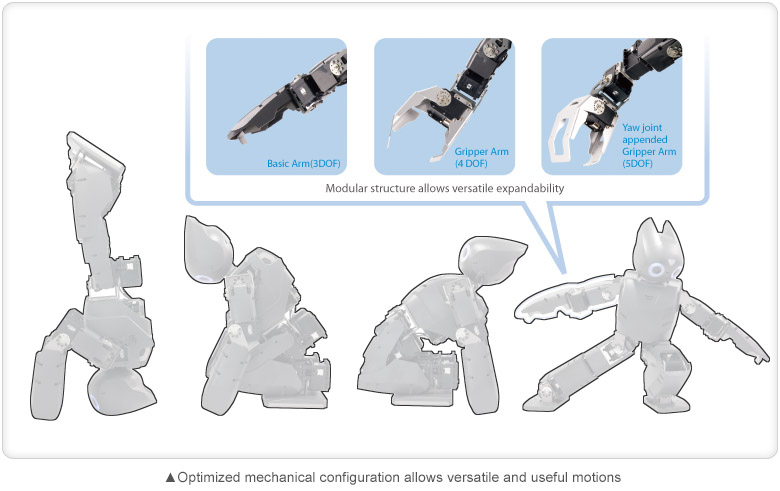
シンプルアーキテクチャ ~ 全関節に共通アクチュエータ使用
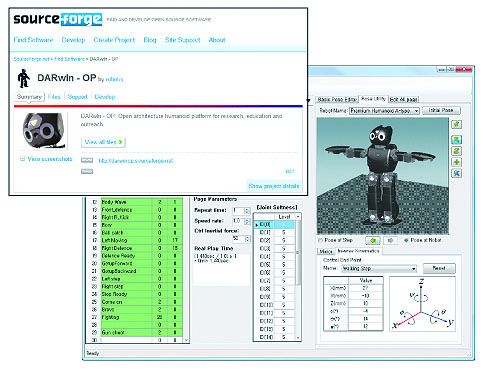
オープンプラットフォーム(ハードウェア&ソフトウェア)
外形寸法
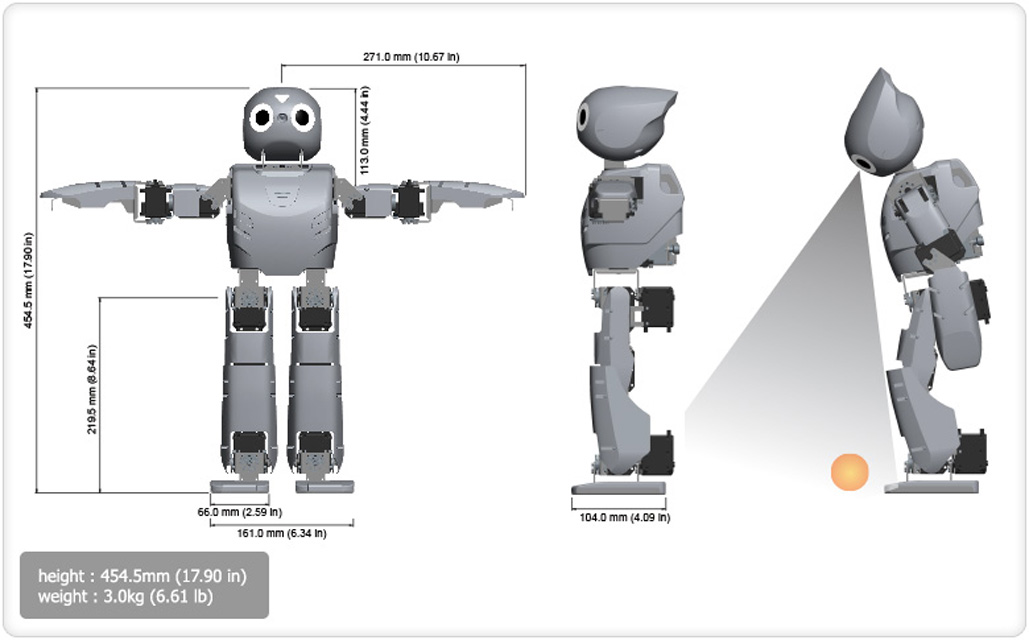
(クリックで拡大します)
DYNAMIXEL MX-Series
copyright (C) Nihon Binary Co., Ltd., All rights reserved.