![]()
![]()
![]()
![]()
![]()
Pickit ビジョンカメラシステム
|
ピックアンドプレースの 自動化にかかわる ソリューションを提供 |

|
Pickit™3次元カメラとソフトウェアによってロボットピッキングは容易なものになります。
Pickit™は高価な画像診断を必要としない、汎用のビジョンソリューションです。
誰でも簡単に設定でき、CADデータなしで新しいワークの認識に対応可能です。
Pickit™システム概要
|
・Pickit™3次元カメラ ・Pickit™プロセッサー ・Pickit™画像処理ソフトウェア ・キャリブレーションツール |

|
|
|
|
|
|
| ピッキング | コンベヤ | パレタイジング | 組み立て | マシンテンディング |
Pickit™アドバンテージ
Pickit™高い汎用性
仕様
Pick-it M-HD |
Pick-it M-HD2 |
Pick-it L-SD |
Pick-it L-HD |
|
| 三次元測定方法 | STRUCTURED LIGHT | |||
| 3D画像取り込み時間 | 200 - 1000 ms | 200 ms ~ | 300 ms | 200 - 1000 ms |
| 3Dカメラ解像度 | 1920 x 1200 | 1944 x 1200 (2.3MP) | 640 x 480 | 1920 x 1200 |
| 3Dカメラ精度(mm) | 0.15 - 0.8 mm | - | 1.0 - 3.0 mm | 0.3 - 1.6 mm |
| 3Dカメラ正確度(%) | < 0.75 % | < 0.4 % | < 1.2 % | < 0.75 % |
| 3Dカメラ正確度(mm) | 2 - 4 mm | 1 - 2 mm | 4 - 18 mm | 3 - 7 mm |
| ピッキング推定精度 | 1.5 x 3D camera accuracy | 1.5 x 3D camera accuracy | 1.5 - 2 x 3D camera accuracy | 1.5 x 3D camera accuracy |
| 3Dカメラ重量 | 2 kg | 880 g | 1030 g | 2 kg |
| 3DカメラとPCの接続 | M12-8 (USB) - USB3 | M12-8 (Ethernet) | M12-8 (USB) - USB3 | M12-8 (USB) - USB3 |
| PCとロボットの接続 | TCP/IP over Ethernet | |||
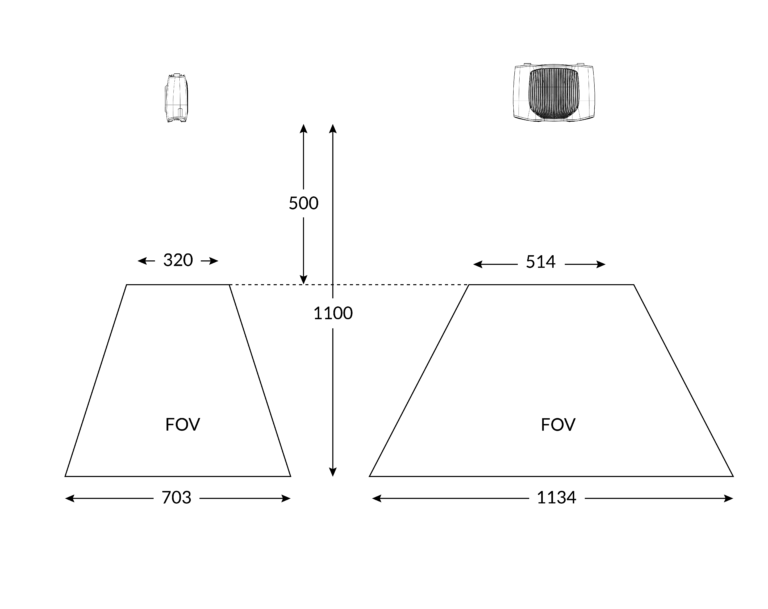
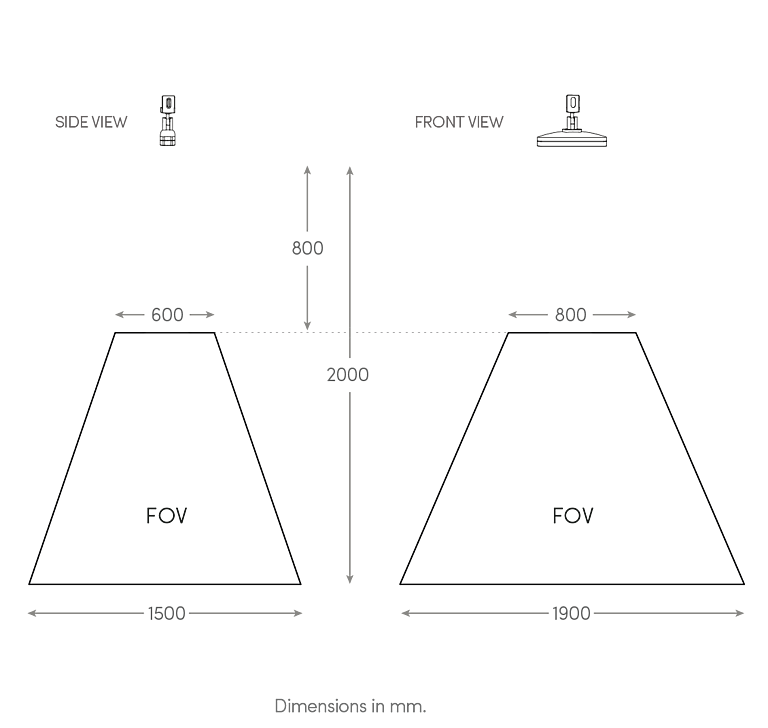
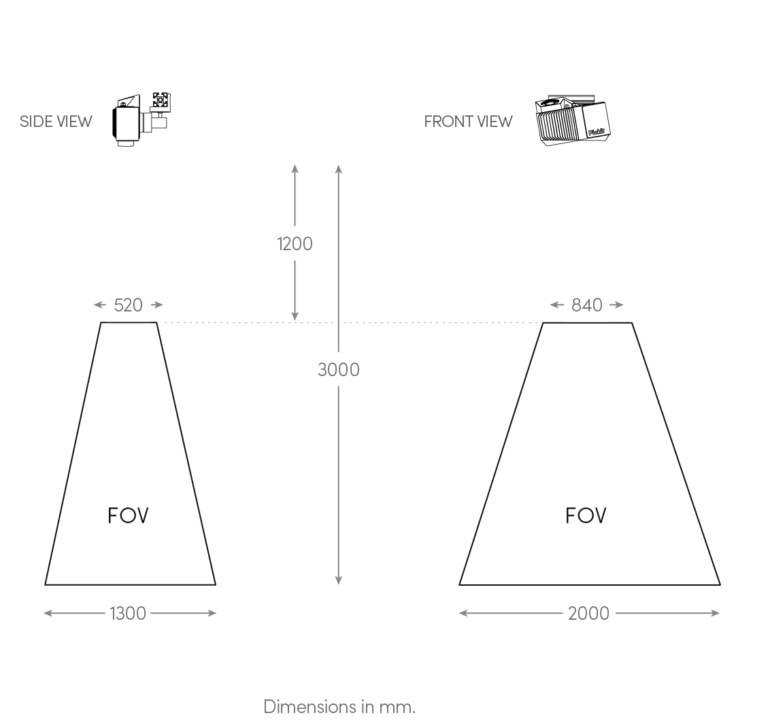
| 撮影範囲 | 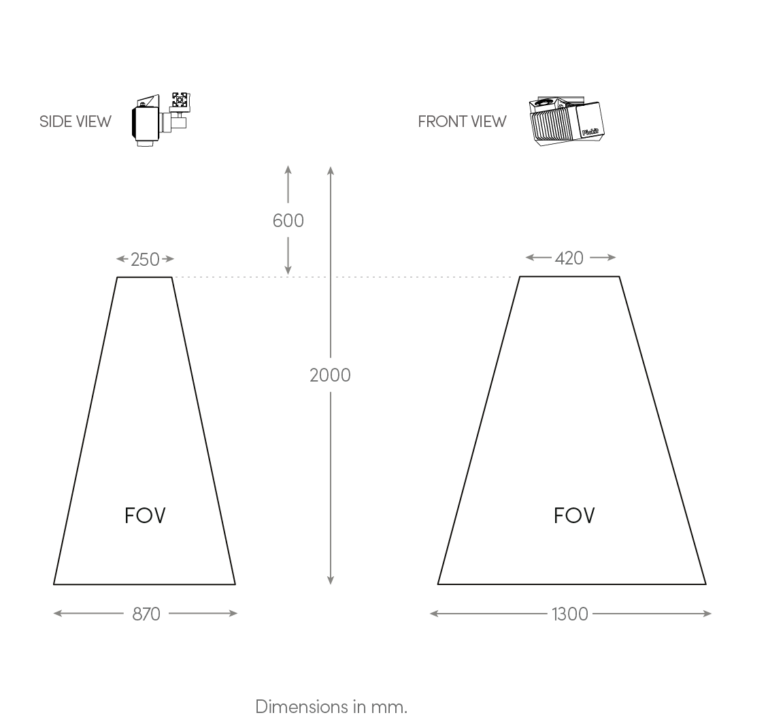 |
 |
 |
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.