![]()
![]()
![]()
![]()
![]()
FTセンサ搭載 SMARTグリッパ RG2-FT

インテリジェント グリッピングで、物体を見て触る
RG2-FTは、正確なパラメーターを前もってプログラムできない場合で
あっても、センシングとインテリジェンスが追加されたグリッパーにより、
最適なワークを実行します。
これにより、人であるオペレーターと真の協働が実現され、人とロボットが
お互いをサポートし合えます。
特長
仕様
| 技術仕様 | 最小 | 平均 | 最大 | 単位 |
| 合計ストローク(調整可能) | 0 | - | 100 | mm |
| 指の位置分解能 | - | 0.1 | - | mm |
| グリッピングフォース(調整可能) | 3 | - | 40 | N |
| リバースバックラッシュ | 0.2 | 0.4 | 0.6 | mm |
| 動作温度 | 5 | - | 50 | ℃ |
| 重量 | - | 0.77 | - | kg |
| 消費電力 | 6.5 | - | 22 | W |
| FTセンサー仕様 | Fxy | Fz | Txy | Tz |
| 許容範囲 | 20 N | 40 N | 0.7 N | 0.5 N |
| ノイズフリー分解能 | 0.1 N | 0.4 N | 0.008 Nm | 0.005 Nm |
| 変形量 | 0.4mm | 0.1 mm | 2 ° | 5 ° |
| 近接センサー仕様 | 最小 | 平均 | 最大 | 単位 |
| 計測範囲 | 0 | - | 100 | mm |
| 精度 | - | 2 | - | mm |
| ノンリニアリティ | - | 12 | - | % |
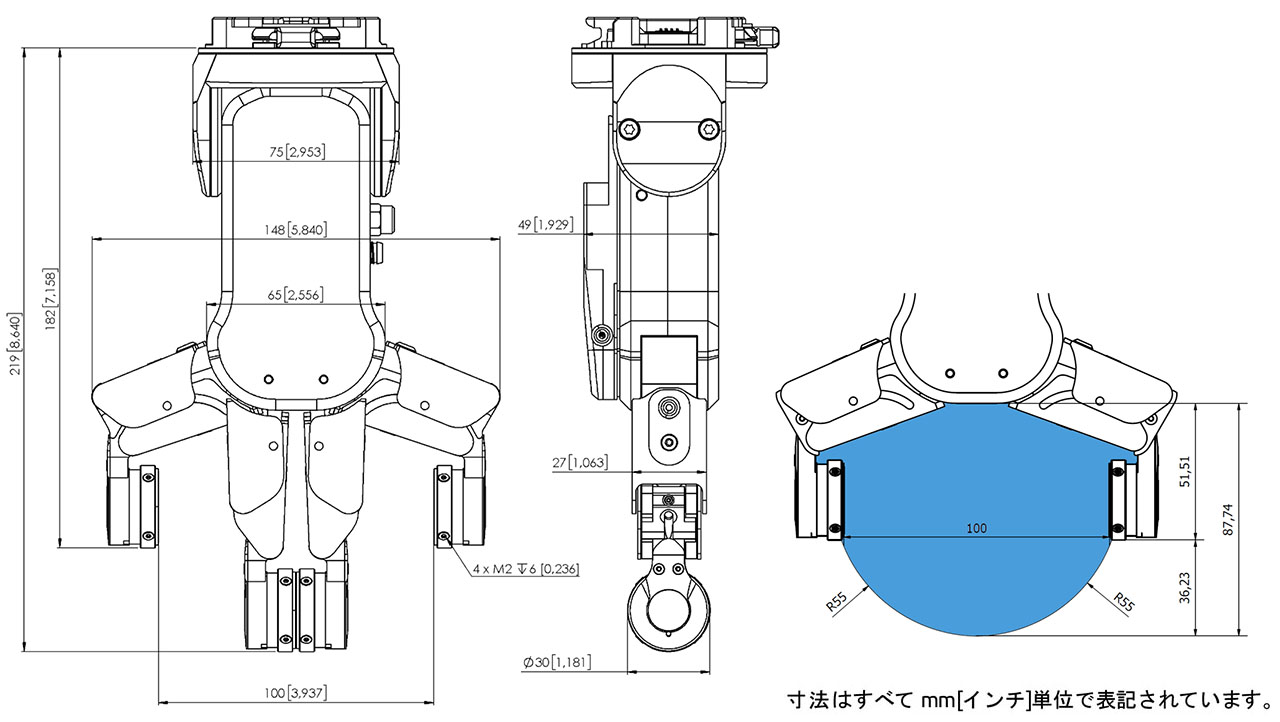
グリッパー作業空間
copyright (C) Nihon Binary Co., Ltd., All rights reserved.