![]()
![]()
![]()
![]()
![]()
MECA500
マイクロオートメーション向け
コンパクトで精密な産業用ロボット

 |
|
| 狭い空間を有効活用 | |
| 限られた作業スペースを最大限効果的に活用できる 超コンパクト設計。 6軸産業用ロボットとしては最少接地面、しかも コントローラーはアームに内蔵。 |
|
| 繰り返し精度 ±5㎛ | |
| 比類ない高反復精度によって、極めて正確なポジショニング が求められるタスクや、精密なマニピュレーションを高い 信頼性で自動化。 |
| 簡単接続で即運用 | |
| シンプルながら強力で柔軟なコネクティビティが既存の システムや生産ラインへの短時間での組み込みを実現、 導入したらすぐに稼働。 |

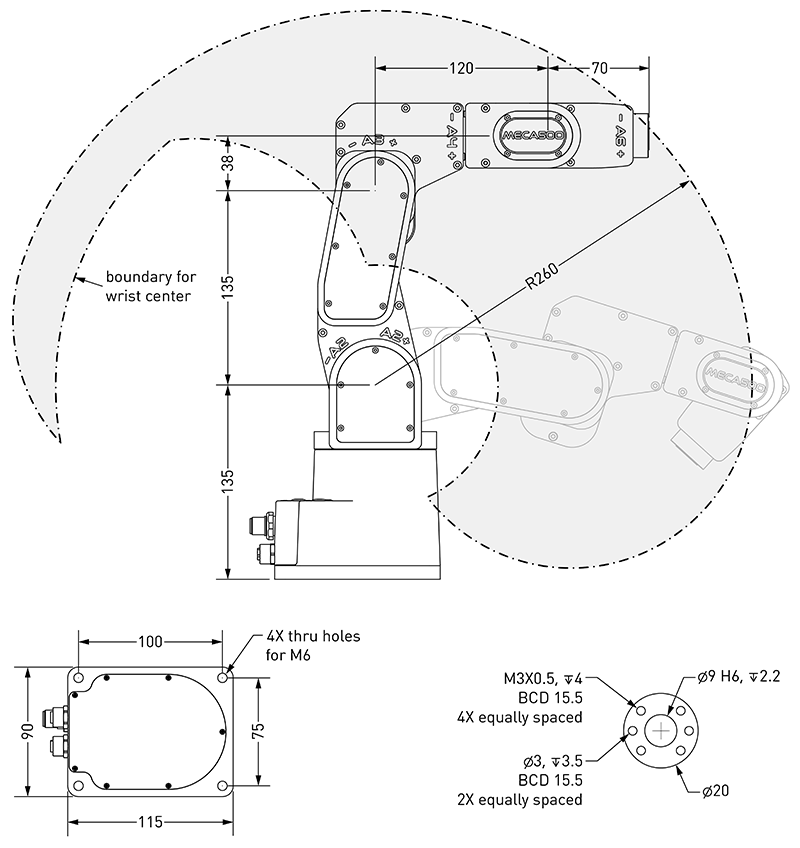
サイズ及び動作範囲
 |
積載重量 500 g |
| 本体重量 4.5 kg |
|
| アーム長さ (フランジ長) 330 ㎜ |
コントローラー
外部コントローラ―無し 0 kg |
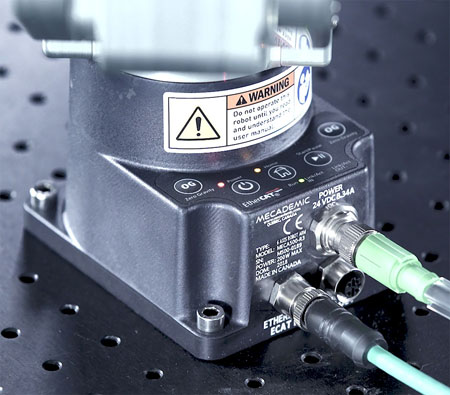 |
| 電源電圧 24 V |
|
精度
 |
繰り返し精度 ±5㎛ (0.005 ㎜) |
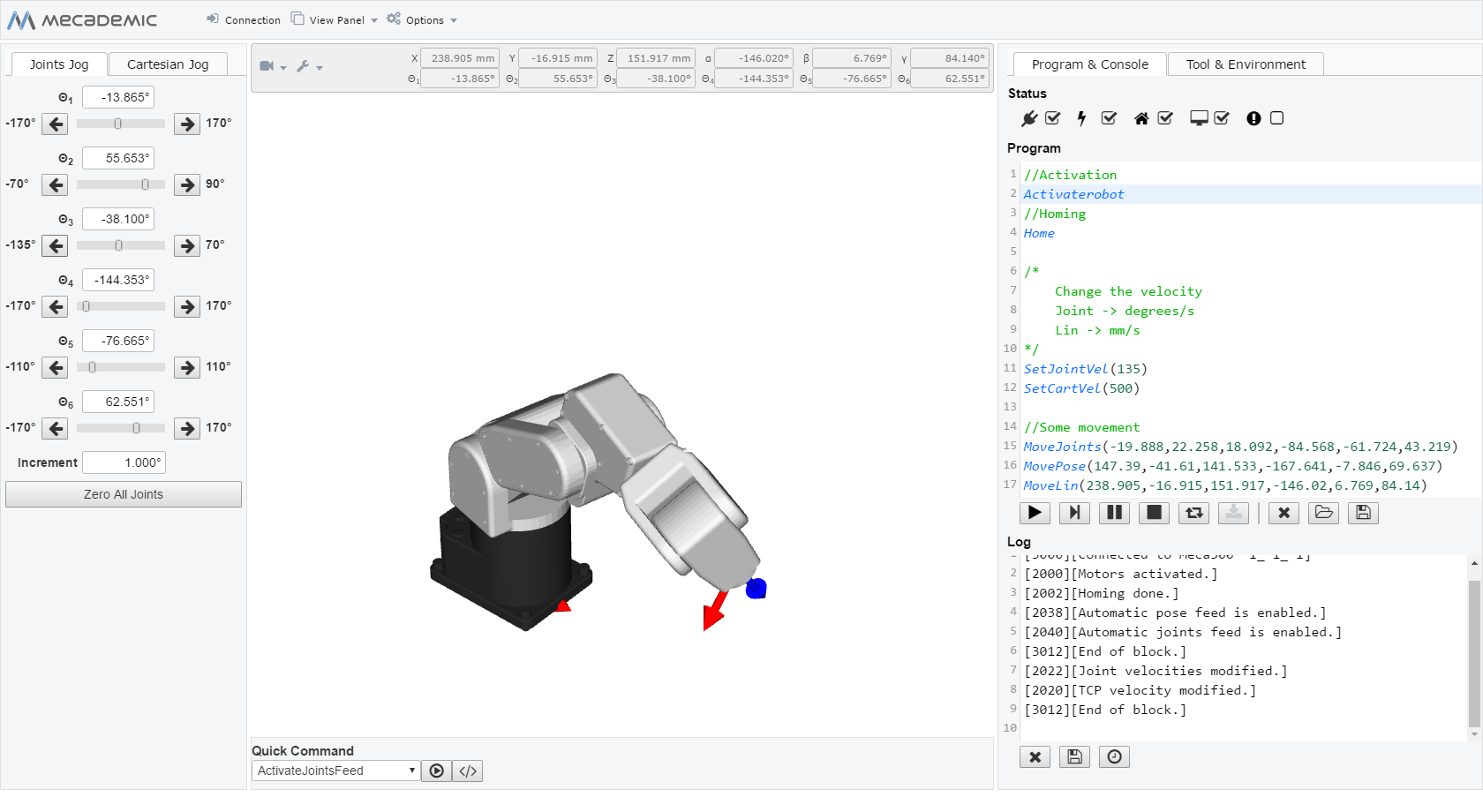
オペレーション
 |
 |
安全性
 |
セーフティモジュール Cat.3 / PL d |
専用小型電動グリッパー MEGP 25

技術仕様
| ・可搬重量 | 0.5 kg | ||
| ・反復精度 | ±5㎛ (0.005 ㎜) | ||
| ・最大リーチ(フランジまで) | 330 ㎜ | ||
| ・重量 | 4.5 kg | ||
| ・回転動作範囲 | - 関節 1 | -175° ~ +175° | |
| - 関節 2 | -70° ~ +90° | ||
| - 関節 3 | -135° ~ +70° | ||
| - 関節 4 | -170° ~ +170° | ||
| - 関節 5 | -115° ~ +115° | ||
| - 関節 6 | ±100 回転 | ||
| ・回転速度 | - 関節 1、2 | 150°/秒 | |
| - 関節 3 | 180°/秒 | ||
| - 関節 4、5 | 300°/秒 | ||
| - 関節 6 | 500°/秒 | ||
| ・ブレーキ | 関節 1、2 および 3 | ||
| ・取り付け方向 | 制限なし | ||
| ・安全モジュール | カテゴリー 3、PL d | ||
| ・電源 | (入力) | 90 ~ 264 VAC @50-60Hz | |
| (出力) | 24 VDC | ||
| ・通信 | Ethernet TCP、EtherCAT | ||
| ・コントローラ | ベース部に内蔵 | ||
| ・保護等級 | IP40 | ||
copyright (C) Nihon Binary Co., Ltd., All rights reserved.