![]()
![]()
![]()
モバイルマニピュレーション研究用
双腕アーム自立走行プラットフォーム
| MOVO | |
|
■ 7DOFアーム双腕構成 |

 |
 |
 |
 |
|||
| オープン & ハイエンドハードウェア |
ROS ネイティブ対応 | コネクティビティ | 高度なナビゲーション | |||
| 時間と労力を節約し 自身の研究課題に集中 |
MoveIt!および Gazeboを 完全サポート |
Ethernet、WiFi、HDMI、USB 多様な外部接続 |
細かな設定不要 即座に自律走行が可能 |
 |
 |
 |
||||
| センサ支援による 遠隔操作 |
マップ生成 | SLAM | ||||
| センサ情報で衝突回避 容易に遠隔操作 |
自律走行のために 自身の環境マップを 生成 |
高性能走行お距離計と センサ情報の有効活用 |
仕様
| 全体高さ | 1100mm ~ 1580mm (電動昇降) |
| ベース部占有面積 | 508mm(幅) x 810㎜(奥行) |
| 全体重量 | 120 kg |
| 動作環境温度 | 5℃ ~ 40℃ (屋内) |
| 動作時間 | 8時間 (通常使用) |
| 充電時間 | 5時間(標準)、2時間(高速充電) |
| システム自由度 | 8 ~ 27 自由度 |
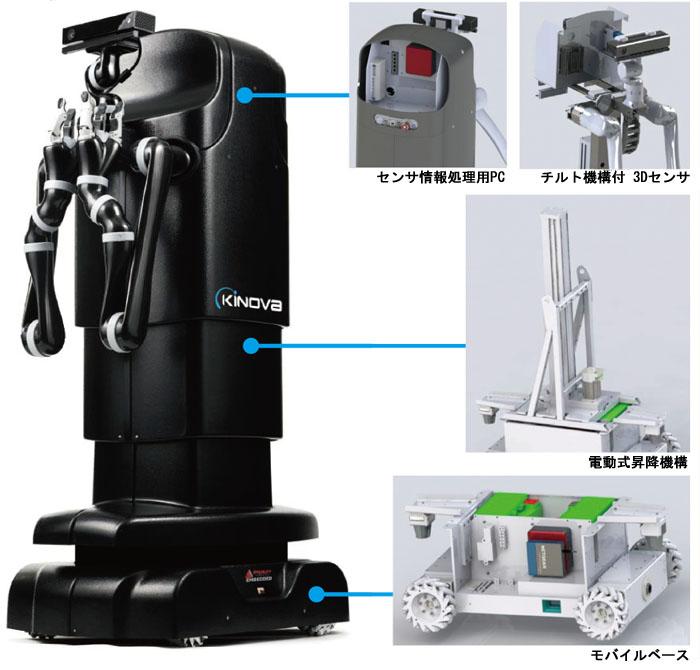
| アーム | KINOVA JACO2 |
| グリッパー | 2指 または 3指 |
| アーム動作速度 | 20 cm/秒 |
| 最高走行速度 | 2 m/秒 |
| 走行ドライブ | ホロノミック |
| センサ (走行ベース) | 2D平面レーザー (正面及び背面) |
| センサ (ヘッド部) | Kinect for Xbox One |
| アクチュエータ | 位置、速度、トルク、湿度 |
| 内蔵PC | 専用PC (2台) |
| CPU | インテル NUCキット NUC5i7RYH |
| RAM | 16 GB |
| ハードディスク | 128 GB SSD |
| インターフェイス | HDMI、USB 3.0 |
| 通信 | Ethernet、WiFi |
| オーディオ入力 | 3.5」mmジャック |
開発環境
| ・ROS Indigo ・Ubuntu 14.04 MoveIt! Gazebo対応 |
 |
構造
copyright (C) Nihon Binary Co., Ltd., All rights reserved.