![]()
![]()
![]()
![]()
Inspire-Robots社製 軽量5本指ロボットハンド
RH56シリーズ

Dexterous Handsは、6つのミニチュアリニアサーボドライブと6つの圧力センサーが 内部に
統合された革新的なリニアドライブ設計を特徴としています。
片手には6つの自由度と12のモータージョイントがあり、力の位置混合制御アルゴリズムと
組み合わせることで、人間の手をシミュレートして正確な把持操作を実現できます。
ROSをサポートし、ROSプラグインが利用したソフトウェア開発が可能です。
用途に合わせた3つのモデル



仕様
モデル名 |
RH56DFTP-0L RH56DFTP-0R 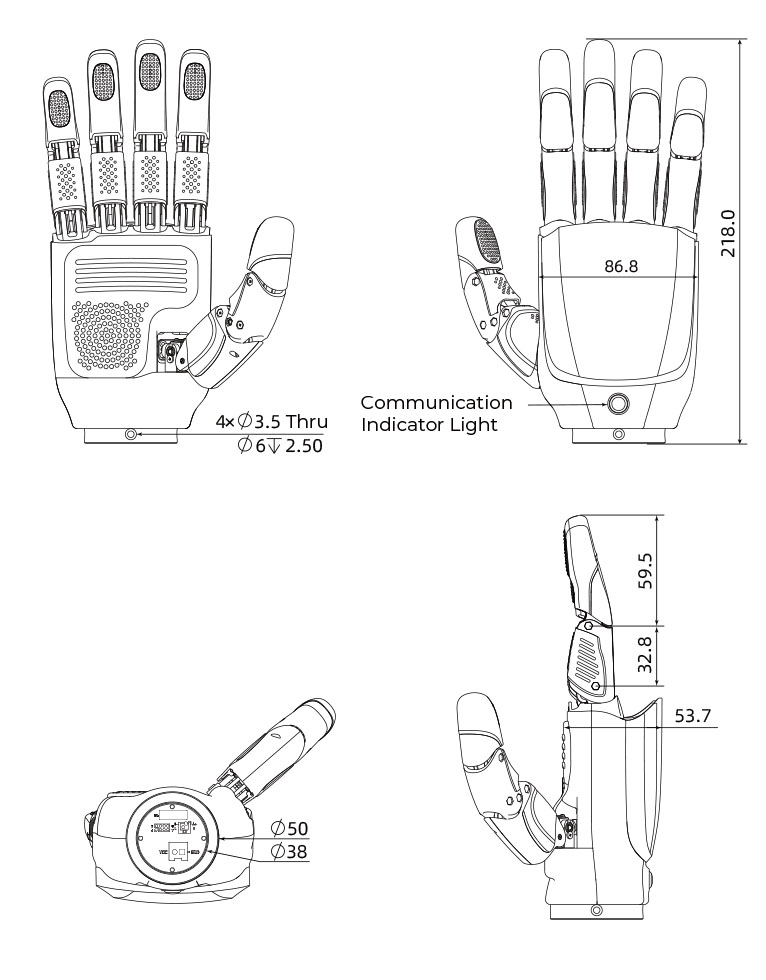 |
RH56DFX-2L RH56DFX-2R 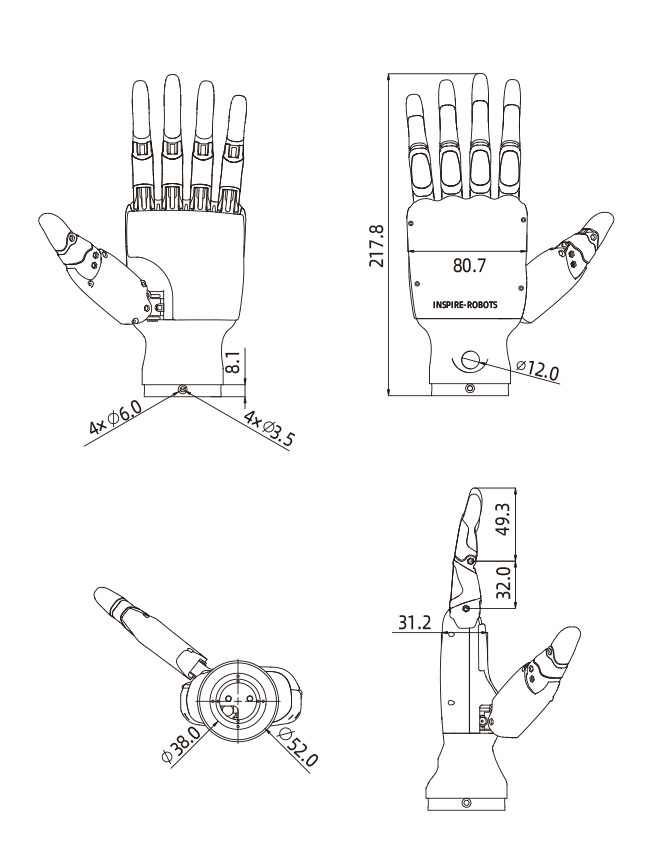 |
RH56BFX-2L RH56BFX-2R 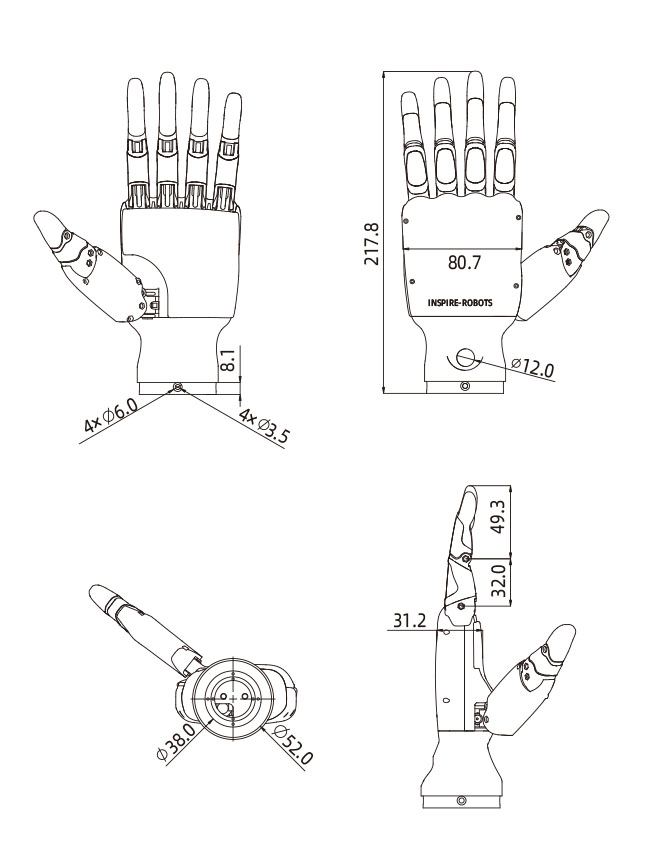 |
| 自由度 | 6 | 6 | 6 |
| 関節数 | 12 | 12 | 12 |
| 力センサ | 12 | - | - |
| 触覚センサ | 12 | - | - |
| 制御インターフェース | ModbusTCP+CAN (RS485) |
RS485 | RS485 |
| 駆動電圧 | DC24V±10% | DC24V±10% | DC24V±10% |
| 静止電流 | 0.15A | 0.2A | 0.2A |
| ピーク電流 | 4A | 2A | 2A |
| 反復精度 | ±0.2mm | ±0.2mm | ±0.2mm |
| 重量 | 790±10g | 540g | 540g |
| 指先最大フォース | 30N | 親指 : 15N 4指 : 10N |
親指 : 6N 4指 : 4N |
| フォース分解能 | - | 0.50N | 0.50N |
| 親指回転範囲 | >85° | >65° | >65° |
| 親指回転速度 | - | >107° | >235° |
| 角速度(親指) | >130°/秒 | >70°/秒 | >150°/秒 |
| 角速度(4指) | >200°/秒 | >260°/秒 | >570°/秒 |
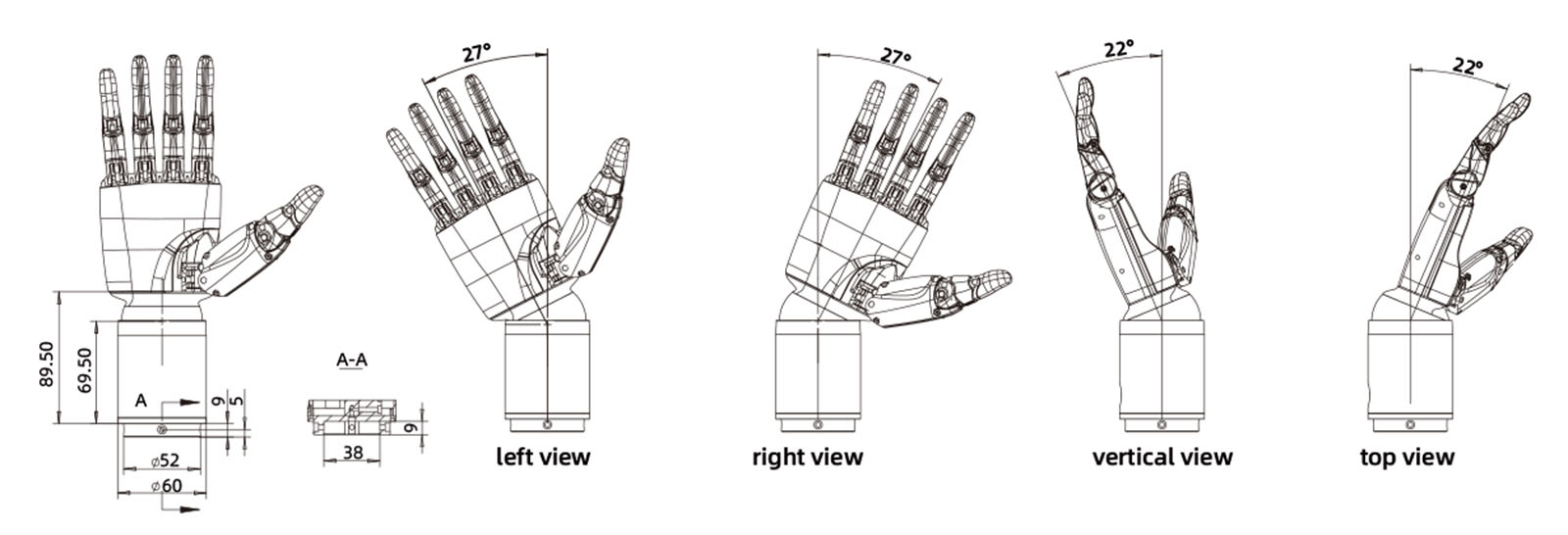
機械式手首 AMW-RH-12-2 (オプション)

| 自由度 | 2 | |
| Yaw 可動範囲 | 0.8秒/54° (無負荷シングルストローク時) | 範囲: ±27°: | |
| Pitch 可動範囲 | 0.8秒/44° (無負荷シングルストローク時) | 範囲: ±22°: | |
| トルク | 2NM3 | ||
| 重量 | 220g (手首のみ) / 650g (手 + 手首) |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.