![]()
![]()
![]()
![]()
![]()
四輪自律走行ロボット
HUSKY A200
四輪自律走行ロボット
HUSKY A200

|
■ 過酷環境での試験の為の無人陸上車両プラットフォーム ■ 高トルク四輪駆動で野外での確実な走行を確保 ■ 用途に応じた多種多様な機器を搭載できる標準規格レールと供給電源 ■ シンプルなソフトウェアインターフェイスと標準開発環境用ドライバ提供 |


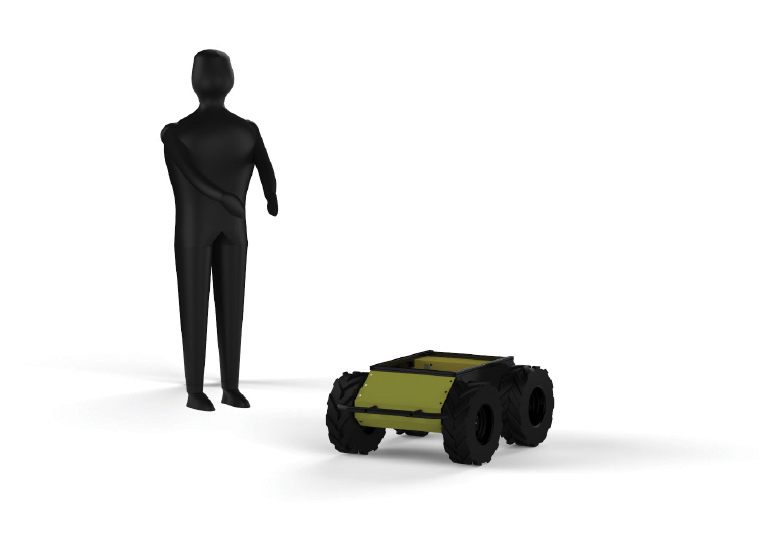
概要
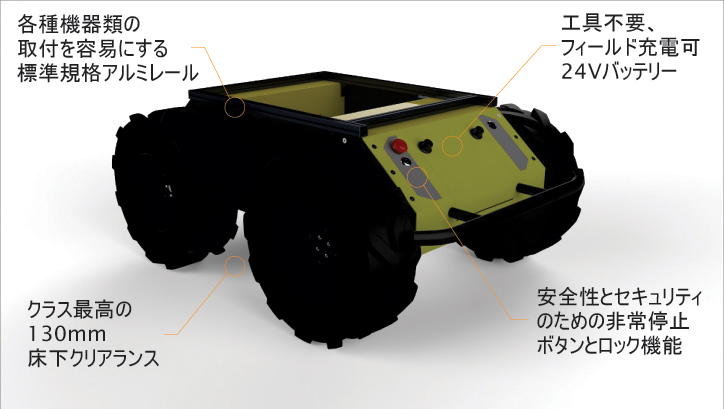
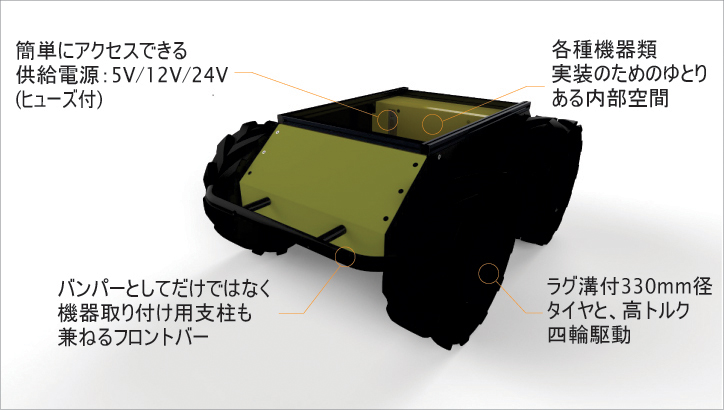
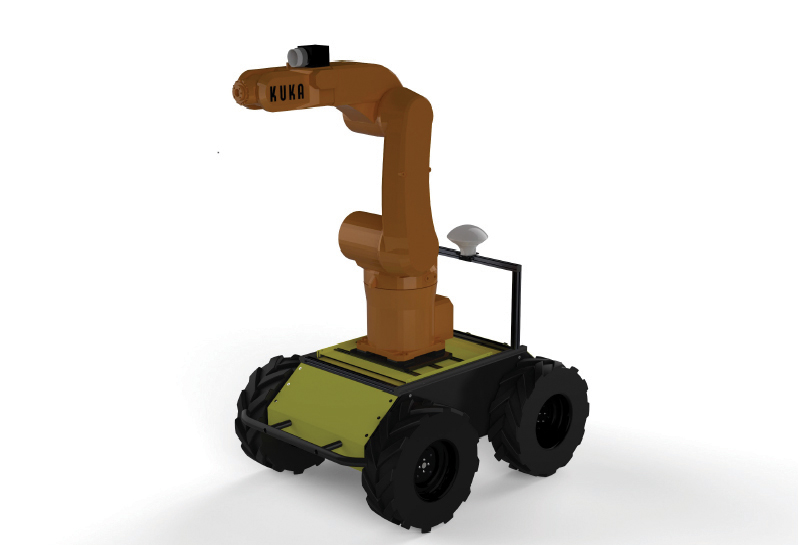
各部名称
アプリケーション例
| オープンアーキテクチャと拡張性によって、複数のロボットが相互連動する マルチロボットシステムも簡単に構築することができます。 |
 |
 |
車両の回転制御、車輪走行距離の高精度計算、電力系統の診断機能を利用した、 高度な状況判断と予測が可能です。 |
| 遠隔操作あるいは自律操作タスクのために、市販のマニピュレータと簡単に インターフェイスすることができます。 |
 |
 |
遠隔制御の機能が標準で提供されており、ジョイスティックなど操作用デバイスを 接続すれば、すぐに操作を始めることができます。 |
仕様
| 外形寸法 | 990mm(全長) x 670mm(幅) x 390mm(高さ) |
| 重量 | 47kg |
| 最大荷重 | 75kg |
| オフロード荷重 | 20kg |
| 最大速度 | 1.0 m/s |
| 床下クリアランス | 130mm |
| 車輪 | 330mm |
| 駆動系 | 四輪駆動(メンテナンス不要ベルト) |
| 登坂能力 | 45°(100%勾配) |
| 横移動能力 | 30°(58%勾配) |
| 動作温度 | -10 ~ 30℃ |
| 保管時温度 | -40 ~ 50℃ |
| 防水規格 | IP 54 |
| 通信 | RS-232@115200 baud |
| 制御モード | 直流、車輪速度、運動学的速度 |
| エンコーダー | 直交 > 200,000パルス/分 |
| フィードバック | バッテリー電圧、モーター電流、車輪走行距離、制御系出力 |
| ドライバ/API | LabVIEW、ROS、Player/Stage、C++、Python |
| 連続動作時間 | 標準3時間、最長8時間 |
| 駆動電力 | 400W(連続)、1000W(最大) |
| バッテリー | 24V 20Ah 密閉型鉛蓄電池 |
| 充電時間 | 4時間 |
| 供給電源 | 5V、12V、24V (5Aヒューズ) |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.