![]()
![]()
![]()
![]()
指先に3軸力覚センサを内蔵
5本指ロボットハンド HandHIRO Robot Hand

|
■ 各指3自由度:[5本指で15関節、15自由度] ■ 最大指先力:3.6N ■ 各指に3軸力覚センサを内蔵 (力覚センサなしも対応可能) ■ インターフェイス回路は掌に内蔵 ■ ホストPCとのLAN通信 ■ 制御用ライブラリ提供 |
| 開発元:岐阜大学工学部 川崎・毛利研究室 |
指機構


| 関節数 | 自由度 | リンク長 [mm] |
重量 [g] | 関節可動域 [deg] | ||
| 第1関節 | 第2関節 | 第3関節 | ||||
| 3 | 3 | 72 : 46 | 120 | -30 ~ 30 | -35 ~ 90 | 0 ~ 112 |
3軸力センサ
定格負荷:5 [N]、定格出力:±0.3 mV/V (xy方向)、±0.1 mV/V (z方向)、分解能:0.01 [N]
センサ信号増幅基板:Amp、A/D、D/A機能及びローパスフィルタ付き
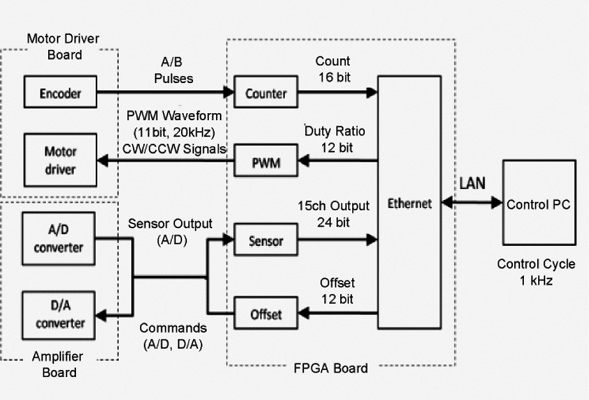
システム構成図

copyright (C) Nihon Binary Co., Ltd., All rights reserved.