![]()
![]()
![]()
![]()
COVVI社製 5本指ロボットハンド
COVVI Robotics Hand

COVVI社は義肢設計において75年以上の経験を積んだ義手製作のパイオニア企業です。
COVVI ロボティクスハンドはCOVVI社の長年培われた義手製作の経験を元に設計された
複雑な操作タスクを完了する能力を備えた最先端の多関節ロボットハンドです。

概要
|
COVVI ロボティクスハンドは、6つの自由度を持つ5本の指のエンドエフェクタです。 COVVI社の長年にわたる義手製作の経験に基づいて設計された COVVI ロボティクス ハンドは、人間の手の機能を模倣した様々な動作を実行できます。 各指は個別に制御が可能で、指の屈曲、親指の回転と屈曲が可能で、最大荷重30kg、 最大握力 213Nで様々な物体をしっかりと掴むことができます。ハンドにはシリコン 製の滑り止めカバーが装着され、各指には一体型の力感知機能が内蔵されています。 COVVI ロボティクスハンドは様々なロボット操作環境において人間の手と置き変える ことができます。 |
主な機能
 ヒューマン・イン・デザイン
ヒューマン・イン・デザイン
COVVI ロボティクスハンドは、人間の形を再現し、動作を模倣して自然な動きを生み出す長年の経験に基づいて設計されています。COVVI ロボティクスハンドは、生物学的モデルに基づいて設計が革新され、グリップの仕組みと動きに関する知識と効果が向上しています。
汎用性
ヒューマノイドハンドは、抱きしめたり持ち上げたりするなどの単純な動作から、タイピングや楽器の演奏などの複雑な動作まで、さまざまなタスクに適応できます。この汎用性により、ヘルスケア、製造、サービス業といった様々な分野でのロボットの適用性が向上します。
ヒューマン・ロボット・インタラクション
5本指の手を使うヒューマノイドロボットは、人間と一緒に簡単に対話できるだけでなく、人間が使用するために設計された環境でも操作できます。COVVIのデザインは、人間が手を使うのと同じ様に、あらかじめ決められたグリップパターン
を通じて直感的な操作を促進します。
器用さ
COVVI ロボティクスハンドは幅広い動きを可能にし、ロボットが細かい運動能力を必要とするタスクを実行することを可能にします。これには、小さな物体を拾い上げたり、ツールを操作したり、繊細な操作を行ったりすることが含まれます。
 把持能力
把持能力
COVVIのロボット ハンドは、親指の反対の動きと指の柔軟性により、さまざまなグリップが可能になり、物体を操作する能力が向上します。
コントロールとフィードバック
COVVIの5本指グリッパーは、力と位置決めに関するフィードバックを提供するように設計されており、操作作業中の制御が向上します。これにより、ロボットが物体をより慎重に取り扱う能力を向上させることができ、これは医療ロボットや繊細な組み立てプロセスなどのアプリケーションで重要です。
継続的な研究開発
COVVI のロボットハンドをヒューマノイドロボットに実装することで、ロボット工学、生体力学、AI の研究をサポートできます。私たちの使命は、人間のような動きや協調に関連する新しい技術の継続的な研究開発を支援するシステムとして機能することです。
物体認識とハンドリング
COVVI のロボットハンドは、高度なセンサーと併用することで、ロボットがさまざまな物体を認識し、最適な掴み方を判断できるようにもなります。この研究は、ロボットの組み込み、特にロボットが人間と一緒に作業する環境での自動化の開発に役立ちます。
COVVIでは、さまざまなアプリケーションや業界で、高度なロボットハンドの機能、
適応性、使いやすさを確保することに注力しています。
多彩なグリップパターン

| 
| 
| 
| 
| 
| 
| 
|
| Tripod Grip | Precision Closed Grip |
Precision Open Grip |
Tripod Open | Power Grip | Glove Grip | Garb Grip | Trigger Grip |
| 一般的な把持 | 小さな物体を掴む | 小さな物体を掴む | 薬指と小指が開いた ままのTripod Grip |
重い物体の持ち上げや 操作 |
開口部を通して 製品をはめ込む |
親指が指の前のクローズ ポジションにドライブ するフルグリップ |
トリガーの操作 |

| 
| 
| 
| 
| 
|
| Finger Point Grip | Column Grip | Key/Card Grip | Cylinder Grip | Tap Grip | Relaxed Grip |
| ボタンやタッチスクリーンの操作 | スイッチの操作 | 小さな物体を掴む | より大きな物体をつかむ。 | ボタンやタッチスクリーンの操作 | アイテムをプッシュします |
仕様
| 仕様 | 数値 |
| 自由度 | 6 - 個々の指の屈曲+親指の回転と屈曲 |
| 最大荷重(把持) | 30 kg / あらゆるロボットの向きで 10 kg |
| 各指の最大荷重 | 16 kg |
| 指の開閉時間 | 0.8 秒 |
| ノイズ | < 78 dB |
| 入力電圧 | 24 V |
| 制御 | Python API / ROS 2 ドライバー |
| 通信方式 | イーサネット |
| 保護等級 | IP44 |
| 把持速度およびフォース | |
TripodGrip開閉時間 / フォース |
0.4 秒 / 35N |
Power Gripフォース |
213 N |
Key Gripフォース |
22 N |
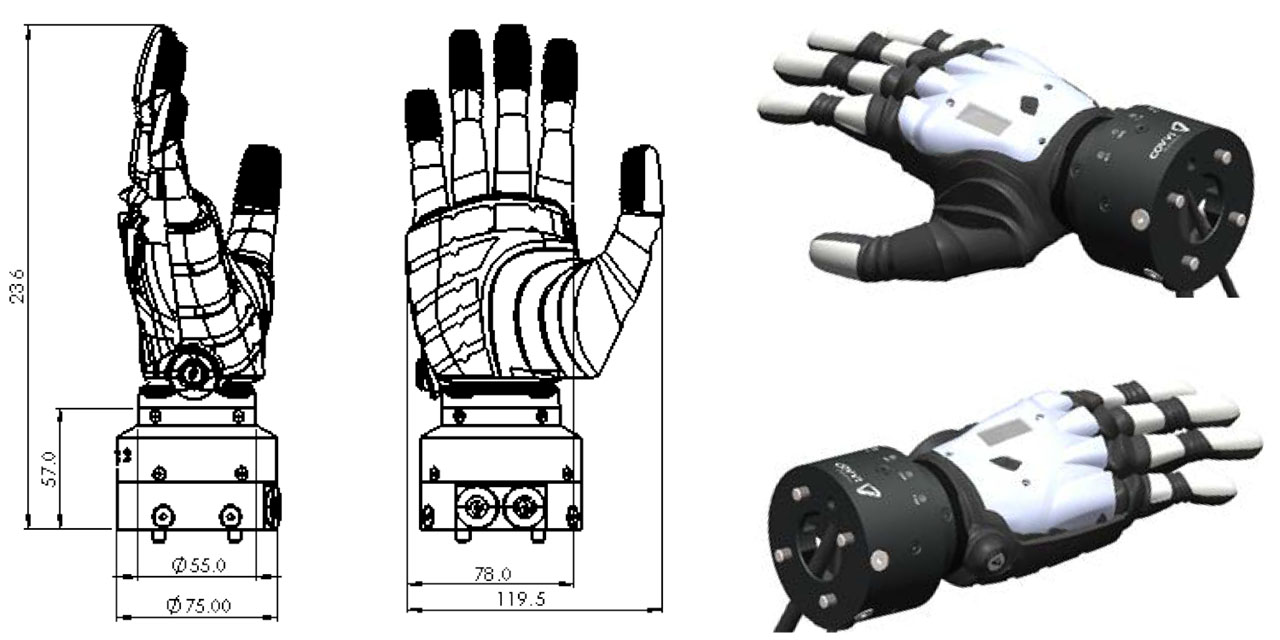
| 外形寸法および重量 | 長さ | 幅 | 重量 |
| COVVIロボティクスハンド | 179 ㎜ | 75 mm | 650 g(± 5g) |
| 手首アダプタ | 179 ㎜ | 75 mm | 650 g(± 5g) |
| ハンド + 手首 | 236 ㎜ | 75 mm | 1030 g(± 10g) |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.