![]()
![]()
![]()
![]()
![]()
四輪自動走行ロボット
JACKAL
最大荷重: 20kg 最高速度: 2m/秒







|
・ 最大荷重 : 20 kg ・ 最高速度 : 2.0 m/秒 ・ 連続動作 : 4 時間 |
JACKAL ユーザー例

箱から出したらすぐに使える簡単設定
JACKALに付属するオンボードPCにはROSパッケージが実装されていますので、開梱してすぐに実験を始める
ことができます。
電源を入れれば、BluetoothやWiFiによるワイヤレス接続で走行させることが可能で、デモの実施、ユーザー間
でのプログラムの公開、アプリケーションの作成などを、即座に行うことができます。
屋外での使用にも耐える防水性と駆動力
JACKALの筐体は、保護等級IP62に準じた高い防水性を備え、非常に堅牢な超軽量アルミ合金で作られています。
高トルク 4輪駆動のドライブトレインはJACKALプラットフォームに最大のトラクションを与え、強力な500Wの
オンボード電力供給によって、タフな路面条件でも強靭な走行を実現、屋内だけでなく屋外での使用にも適して
います。
コンパクトボディに強力な機能と利便性
用途に応じて最適なフィールドテストを実現できるように、JACKALはカスタマイズ可能なトッププレートを備えて
おり、5,12,24V電源ポートやオンボードPCへも簡単にアクセスすることが可能になっています。
さらに、包括的なROS APIが提供されており、ユーザーはJACKALのすべての機能と能力を理解しつつ制御を行う
ことができます。
仕様
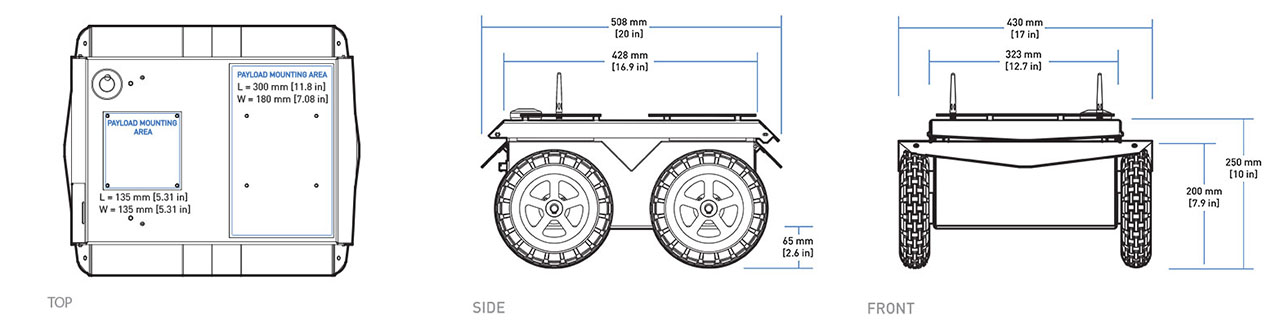
| 外形寸法 | 580mm(全長) x 430mm(幅) x 250mm(高さ) |
| 内部ボックス | 250mm x 100mm x 85mm |
| 重量 | 17kg |
| 床下クリアランス | 65mm |
| 荷重 | 最大 :20kg / 全天候:10kg |
| 最大速度 | 2.0 m/s |
| モーター出力 | 500 W |
| バッテリー | 270Wh リチウムイオンバッテリー |
| 連続動作時間 | 連続稼働2時間 / 標準8時間 |
| 充電時間 | 4時間 |
| 供給電源 | 5V@5A、12V@10A、24V@20A |
| 制御モード | キネマティックコマンド:速度、角速度 オープンループモーターコマンド:電圧 ホイール速度コマンド |
| フィードバック | バッテリーおよびモーター電流、ホイール速度及び走行距離 GPS信号、ジャイロ、加速度計 |
| 通信 | Ethernet、USB 3.0、RS232、IEEE1394 |
| ドライバ/API | ROS 1 Noetic/ROS 2 Humble |
| 付属アクセサリ | ワイヤレスゲームコントローラ、GPS、IMU、オンボードPC、Wi-Fiアダプタ、アクセサリマウンティングプレート |
| 標準モデル | i3-4330TE (Dual Core 2.4GHz)、4GB RAM、120GB HDD、WiFiアダプタ |
| パフォーマンスモデル | i5-4750T (Dual Core 2.9GHz)、4GB RAM、128GB HDD、WiFiアダプタ |
| 動作温度 | -20 ~ 45℃ |
| 保護等級 | IP 62 (IP65も選択可能) |
外形図
カスタムパッケージ
| JETSON2 TX2 開発者用パッケージ |
|
| NVIDIA社とパートナーシップを結び、Jetson TX2に対応する事が出来ました。 Jetson TX2は、高速で効率的なコンピュータ装置で、ロボット開発には最適です。 Jetson TX2 開発者用パッケージは、NVIDIA社の標準ハードウェアインター フェース及びグラフィック処理能力を使用します。強力なGPUとメモリバンド幅59.7 GB/mの8GBメモリが搭載されておりますので、 VSLAMや3Dイメージング、マシンラーニングのアプリケーションに最適です。 |
 |
| EXPLOERE PACKAGE エクスプローラ パッケージ |
|
| 屋内および屋外環境での基本的な自律走行操作のためのパッケージです。 GPSのウェイポイントによるナビゲーション、レーザーセンサで衝突を回避しつつ 屋内でのマッピングやパスプランニングなどの用途に使用することができます。 強力な Mini-ITXコンピュータシステムにはLinuxとROSがプリインストールされて おり、センサ類のROSドライバーもあらかじめセットアップされています。 ・自律走行ロボットの基礎的研究開発 ・センサや測定器、マニピュレータなどのインテグレーション |
 |
| VISION PACKAGE ビジョン パッケージ |
|
| ステレオビジョンのために2台のカメラ、および高性能GPU搭載グラフィック ボードを実装したハイエンドPCを組み込んだ、ビジョン研究用パッケージです。 NVIDIAの汎用並列演算プラットフォームCUDAをプリインストール、ROS環境 でのRVizとGazeboを完全にサポートしています。 ・マシンビジョン ・ヒューマンロボットインタラクション ・ビジュアルSLAM (VSLAM) |
 |
| NAVIGATION PACKAGE ナビゲーション パッケージ |
|
| ハイエンドRTK(リアルタイムキネマティック)GPSシステムに、長距離ベース ステーションを組み合わせたパッケージで、2cm以下の位置決め精度と、 最長1kmの遠隔通信を可能にします。 ・屋外ナビゲーション ・マルチロボットシステム ・遠隔環境調査 |
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.