![]()
![]()
![]()
![]()
![]()
室外対応無人車両プラットフォーム
HUSKY

|
・ 最大荷重 : 75 kg ・ 最高速度 : 3.6 km/h ・ 連続動作 : 3 時間 |
概要
HUSKYは無人陸上車両(UGV:Unmanned Ground Vehicle)を用いる研究開発や製品試作の為のプラットフォームと
して、製造業や軍事関係及び、大学や研究機関の研究者の為に開発されました。Huskyを用いることで、UGVプラット
フォームの開発に掛ける時間と費用を大きく節約する事ができます。
劣悪な天候や地表による環境条件に耐える堅牢性を持ち、高トルク四輪駆動によって荒地や不整地のオフロードでの試験
として、その効果を発揮します。
Huskyはオープンなローレベルシリアル通信プロトコルで制御され、LabVIEW、ROS、Player/Stage、C++、Python
といった開発環境でのプログラミングが可能。遠隔操作など、多くのサンプルアプリケーションが提供されています。
仕様
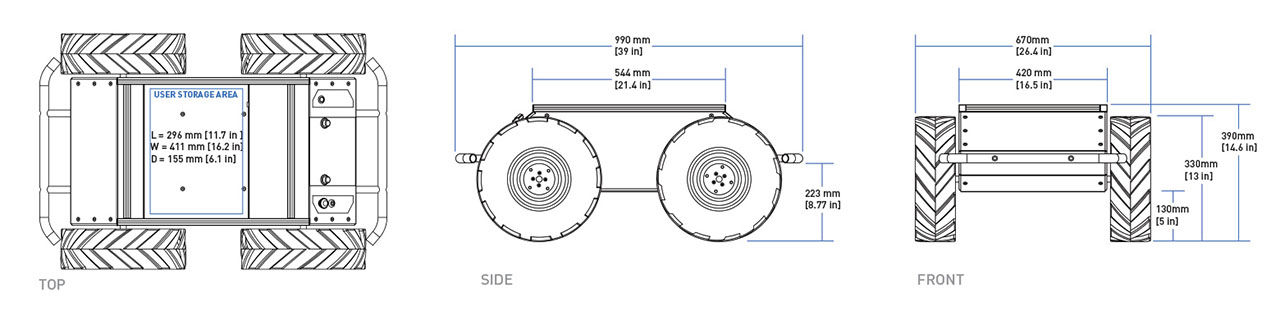
| 外形寸法 | 990mm(全長) x 670mm(幅) x 390mm(高さ) |
| 内部ボックス | 296mm x 411mm x 155mm |
| 重量 | 50kg |
| 車輪径 | 330mm |
| 床下クリアランス | 130mm |
| 荷重 | 最大 :75kg / 全天候:20kg |
| 最大速度 | 1.0 m/s |
| 駆動系 | 四輪駆動(メンテナンス不要ベルト) |
| 登坂能力 | 45°(100%勾配) |
| 横移動 | 30°(58%勾配) |
| バッテリー | 24V 20Ah 密閉型鉛蓄電池 |
| 連続動作時間 | 標準3時間 / 最長8時間 |
| 充電時間 | 4時間 |
| 供給電源 | 5V、12V、24V (5Aヒューズ)、供給電力 192W (480Wまで拡張可能) |
| 制御モード | 電圧、速度、トルク |
| フィードバック | バッテリー電圧、モーター電流、走行距離、制御系出力 |
| 通信 | RS-232@115200 baud |
| エンコーダー | 直交 > 78,000パルス/分 |
| ドライバ/API | ROS 1 Kieetic/ROS 2 Humble |
| 動作温度 | -10 ~ 40℃ |
| 保管時温度 | -40 ~ 60℃ |
| 保護等級 | IP 44 (IP55にアップグレード可能) |
外形図
カスタムパッケージ
基本パッケージ |
|
| このHUSKYパッケージには、基本コンポーネントが含まれております。 mini-ITXコンピュータには、Linux及びROSが搭載され、トッププレートには、 各種センサ、ロボットアームやコンピュータハードウェアを搭載可能です。 センサを搭載のコンピュータと電源に接続すればすぐに使用できます。 |
 |
エクスプローラ パッケージ |
|
| 各種センサを搭載しているHuskyExplorer Packageは、室内外の自律走行の 機能を可能にします。 強力なMini-ITXコンピュータシステムが、Linux及びROSがプレインストール された状態で出荷されます。 すべてのコンポーネントROSドライバがインストールされ、設定済みです。 Husky Explorer Packageにより設計、製造及びシステムのインテグレーション に掛かる時間を節約する事が出来ます。 |
 |
エクスプローラ プロ パッケージ |
|
| Explorer Packageよりも更にアドバンストバージョンになります。 長距離室外自律走行プラットフォーム用に必要な、センサ等のアップグレード版 です。 50m SICK LMS-151 LiDARは、長距離の地面の定量化及びマッピングを可能 にする他、パン・チルト・ズーム付IPカメラにより遠隔制御を長距離で可能に します。 このHuskyには、IP56防水アップグレードが用意されており、室外での使用に 対応し、アップグレード用のリチウムイオン電池パックの使用で、システムの 稼働時間を延長することが可能です。 |
 |
マッピング パッケージ |
|
| Mapping Packageは、大スケール3Dマッピング及びナビゲーションの最上位 アップグレードになります。 このHuskyには、Novatel InertialGNSSナビゲーションシステムが光ファイバ ジャイロと一緒に搭載されておりますので、断続的なGPS信号でも精密な ポジショニングを可能にします。 デュアルアンテナは高い精度を可能にし、GPSベースのヘディング判別と Velodyne 32e 3D LiDARは、ロボットの環境の詳細を検知します。 リチウムイオン電池パックへのアップグレードにより、稼働時間を延長 することが可能です。 |
 |
マニピュレーション パッケージ |
|
| Huskyは、Universal Robots社のUR5ロボット及びRobotiq社のグリッパを 搭載して、各種作業を行う事が出来ます。 UR5はHuskyのトッププレートに専用エンクロージャ及び電源を搭載して マウントされます。UR5は人に安全な協働ロボットで、アーム長は85㎝で、 最大荷重は5kgです。 UR5及びRobotiqはどちらもROSに対応しており、Husky搭載のMini ITX コンピュータシステムに必要なソフトウェアがプレインストールされて おります。 |
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.