![]()
![]()
![]()
![]()
![]()
大型屋内ロボットプラットフォーム
BOXER

|
・ 最大荷重 : 100 kg ・ 最高速度 : 2.0 m/秒 ・ 連続動作 : 8 時間 |
概要
BOXERは、産業用アプリケーションのプロトタイピングと開発のための大型屋内ロボットプラットフォームです。
CLEARPATH社のOTTO 100自律移動ロボット(AMR)を応用したBOXERは、プログラミング可能で、追加のハードウェアで
簡単に拡張できる産業用移動ロボットです。
特長
仕様
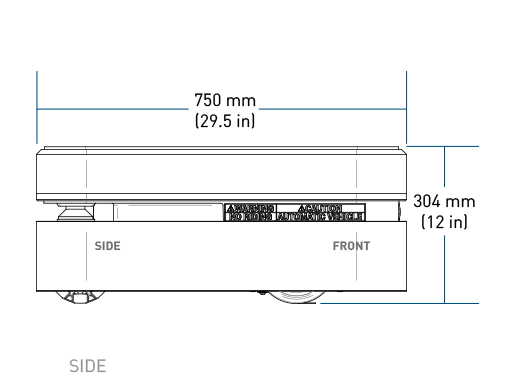
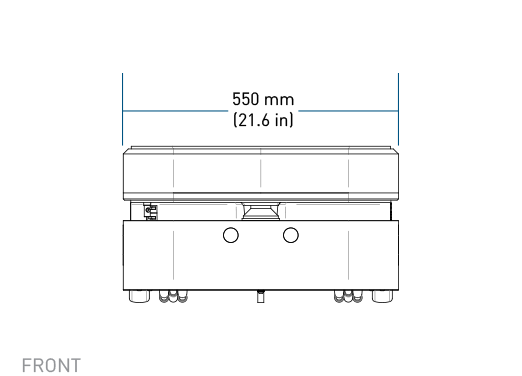
| 外形寸法 | 750mm(全長) x 550mm(幅) x 3041mm(高さ)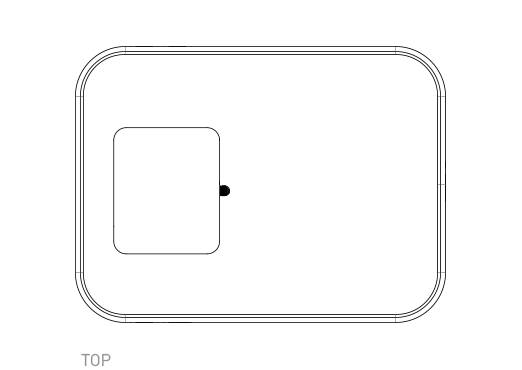
|
| ベース重量 | 127kg |
| ペイロード | 100kg |
| 最大速度 | 2.0 m/秒、加速 1.0 m/s2 |
| サスペンション | Fixed |
| リフティング機構 | 最大50㎜、100kgまで対応 |
| 回転半径 / 駆動方式 | 0 mm / 後輪デファレンシャルドライブ |
| 動作環境 | 20 ~ 40℃ |
| バッテリー | リチウムイオンバッテリー |
| バッテリー容量 | 924Wh / 19-32V |
| 連続稼働時間 | 稼働時間:8時間 / 待機時間:最大16時間 |
| 充電時間 | 自動充電 20分 / 手動充電 4時間 |
| 内部コンピューターインターフェース | ROS2 API |
| ROSコンピューター(オプション) | Vecow ECX-2000 シリーズ 又は EVS-2000 シリーズ |
| ビジュアルコミュニケーション | 360° LEDライトチューブ(ステータス表示用) |
| ペイロードインターフェース | Ethernet x 1、RJ-45、PoE、USB 3.0a Type A、デジタル入力 x8、 デジタル出力 x8、E-stop loop breakout、dual-channel、Serial interface、 RS-232、2-wire、2X safety relay dry contacts、Emergency stop reset interlock |
| WiFi | 802.11 ac/a/b/gn、2.4GHz/5GHz |
| ナビゲーションセンサー | Hokuyo UAM-05LP 2D LiDAR、270° FoV、5 m safety-rated protective field range、20 m non-safety-rated warning field range |
| 反転センサー / 3D障害物センサー | Pepperl+Fuchs R2100 2D LiDAR, 88°FoV / Intel RealSense D435 |
| ドライバ/API | Clearpath自律航行ソフトウェア、ROS1 Noetic または ROS2 Foxy、Gazebo、 LEDライトコントロール、RViz & URDFサポート |
アクセサリ
 UR5 Universal Robots |
 3DM-GX5-25 MicroStrain |
 Intel RealSense D435i Intel |
 Velodyne VLP-16 Velodyne |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.