![]()
![]()
![]()
![]()
![]()
Bota Systems社製フォーストルクセンサ
SensONE
|
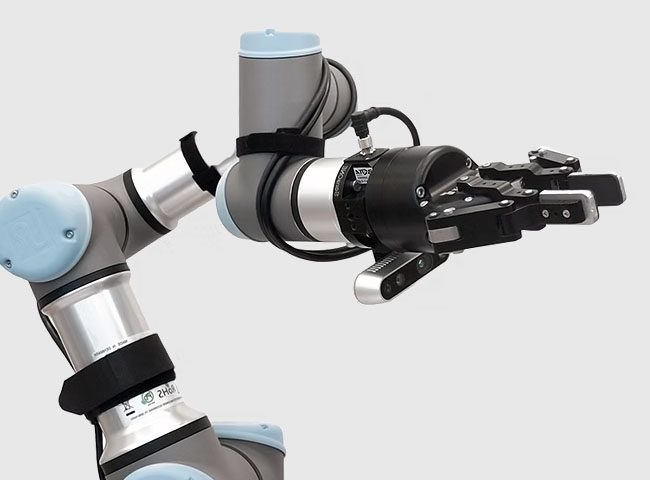
SensONE 各社協働ロボットに対応した6軸フォーストルクセンサ ・ 慣性センサ―と温度センサーを備えた オールインワンの6軸フォーストルクセンサ― ・ ISO 9409-1-50-4-M6 フランジ ・ ROS、LabViewおよびMatlab用オープンソフトウェア ・ 6自由度IMU (※ EtherCAT通信のみ対応) ・ 3Dカメラとツール用の3X取り付けフランジ ・ 電源範囲:9-48V (USBの場合は5V) ・ 過負荷保護 ・ コンパクトパッケージで高剛性構造 ・ 防塵防滴 ・ Kinova社Jen2ロボットアームと互換性あり 
|
|
仕様
| Fx | Fy | Fz | Mx | My | Mz | ||
| 定格容量 | 500 N | 500 N | 1200 N | 15 Nm | 15 Nm | 12 Nm | |
| 許容過負荷 | 2500 N | 2500 N | 4500 N | 35 Nm | 35 Nm | 40 Nm | |
| 分解能 (100Hz、ノイズフリー) |
Serial | 350 mN | 350 mN | 250 mN | 7.2 mNm | 7.2 mNm | 3.0 mNm |
| EtherCAT | 200 mN | 200 mN | 150 mN | 4.0 mNm | 4.0 mNm | 2.0 mNm | |
| ノイズ | Serial | 55 mN | 55 mN | 40 mN | 1.2 mNm | 1.2 mNm | 0.5 mNm |
| EtherCAT | 26 mN | 26 mN | 20 mN | 0.7 mNm | 0.7 mNm | 0.2 mNm | |
| 精度 | < 2.0 % | < 2.0 % | < 2.0 % | < 2.0 % | < 2.0 % | < 2.0 % | |
| ノンリニアリティ | < 2.0 % | < 2.0 % | < 2.0 % | < 2.0 % | < 2.0 % | < 2.0 % | |
| ドリフト | < 100 mN/h | < 100 mN/h | < 500 mN/h | < 3 mNm/h | < 3 mNm/h | < 3 mNm/h | |
| ドリフトオーバータイム | < 1.5 N/h、< 10 mNm/h | ||||||
| 通信方法 | Serial | USB、RS422 | |||||
| Ethercat | CANopen over EtherCAT | ||||||
| サンプリング速度 | Serial | 800 Hz | |||||
| EtherCAT | 2000 Hz | ||||||
| IMU | Serial | - | |||||
| EtherCAT | 6自由度IMU | ||||||
| アクセラレーション | Serial | - | |||||
| EtherCAT | ±2 g、4 g、8g、16g | ||||||
| ジャイロスコープ | Serial | - | |||||
| EtherCAT | ±250°/秒、±500°/秒、±1000°/秒、±2000°/秒 | ||||||
| 保護等級 | IP67 | ||||||
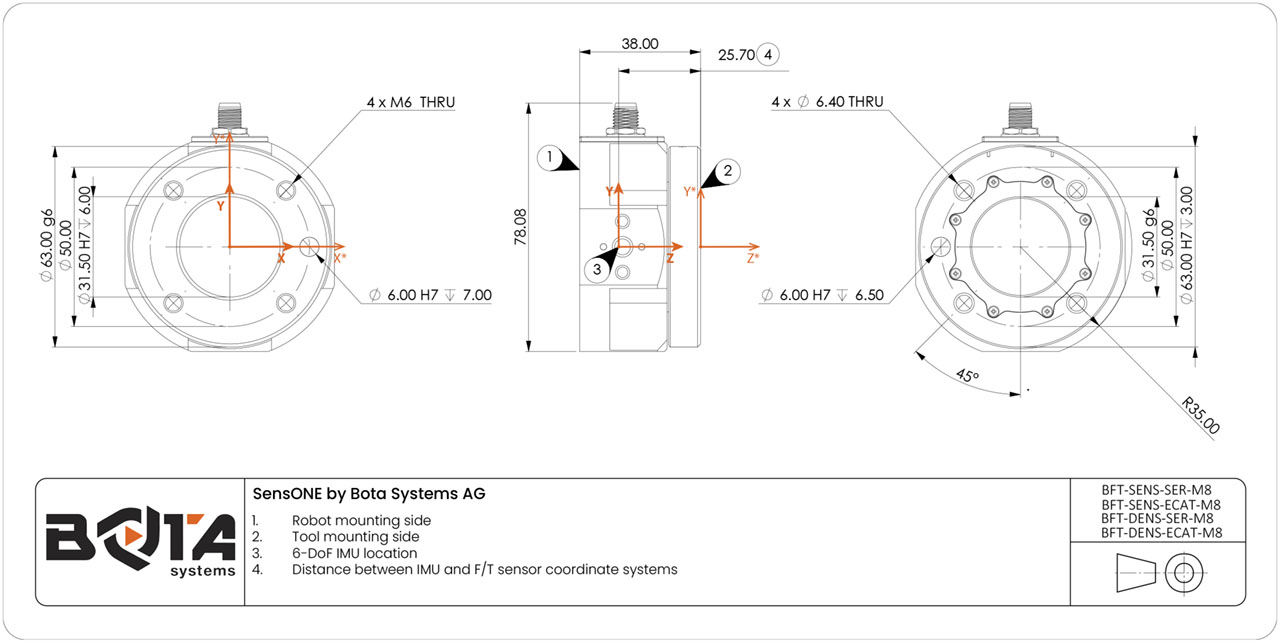
| 外形寸法 | Φ70 x 35 mm | ||||||
| 重量 | Serial | 230 g | |||||
| EtherCAT | 235 g | ||||||
| 動作温度 | 0 ~ 55 ℃ | ||||||
| 電源 | Serial | 5 VDC、1.0 W | |||||
| EtherCAT | 9 ~ 48 VDC、1.5 W | ||||||
copyright (C) Nihon Binary Co., Ltd., All rights reserved.