![]()
![]()
![]()
![]()
![]()
多目的ロボットハンド
BarrettHand BH8-282
|
様々な大きさ、形状、柔らかさの物体を確実に把持 フレキシブル 3本指ロボットハンド |
|
 |
BarrettHand ・最大 180度展開 ~ 自在に動く3指 ・軽量 980g ・最大可搬重量 6kg ・コンパクト設計 [狭い空間にも進入] ・再開閉1秒以下の高速駆動 ・劣駆動による柔軟な指関節機構 ・サーボコントローラ内蔵 [外部コントローラなし] ・C/C++ ライブラリ提供 ・指先トルクセンサ、多点触覚センサ、組込型3Dビジョンシステム ~ 豊富なオプション |
概要
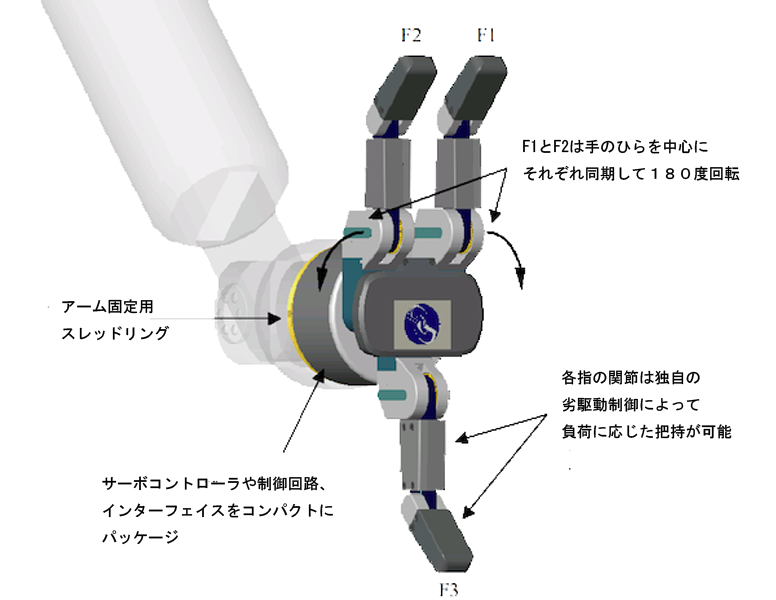 BarrettHandは、様々な形状や大きさの物体をどんな方向からでもしっかり把持する3本指ロボットハンドです。
BarrettHandは、様々な形状や大きさの物体をどんな方向からでもしっかり把持する3本指ロボットハンドです。仕様
| BH8-282 | ||
| 本体質量 | 980 g | |
| 最大可搬質量 | 6.0 kg | |
| 最大提示力 (各指先端部) | 15N(アクティブ)、20N(パッシブ) | |
| 駆動モーター | ブラシレスDCサーボモーター | |
| モーターエンコーダ分解能 | 4096 | |
| 駆動機構 | 総指数 | 3 (固定 × 1、回転 × 2) |
| 総軸数 | 8 | |
| モーター数 | 4 | |
| 関節可動角度 | 指付け根 | 140 ° |
| 第1関節 | 45 ° | |
| 指拡張回転 | 180 ° | |
| 駆動速度 | 全開 → 全閉 | 1.0 秒 |
| 180 °拡張 | 0.5 秒 | |
| 電源 (DC) | 電圧 | 20 ~ 80VDC |
| 消費電力 | 7W (アイドル時)、15W (標準)、250W (最大) | |
| 電源 (AC) | 電圧 | 85 ~ 260VAC 50/60Hz |
| 消費電力 | 10W (アイドル時)、20W (標準)、300W (最大) | |
| 電源ユニット | 204 × 90 × 54 mm、0.7kg | |
| ホストインターフェイス | CANbus、USB、RS232 | |
| 付属ソフトウェア | C/C++ライブラリ、GUIアプリケーション(Windows/Linux) | |
オプション
| フィンガーチップ・トルクセンサ B0106 | ||
| 機能 | 各指の最後のジョイントのトルクを検知 |
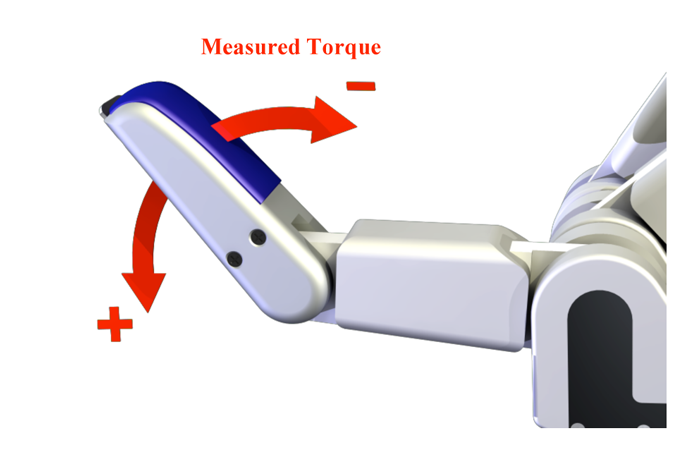 |
| センサ数 | 3(各指に1センサ) | |
| 検出素子 | ひずみゲージ(金属箔) | |
| 検出範囲 | ±1 Nm | |
| 分解能 | 0.04Nm | |
| 触覚センサ B4335 | ||
| 機能 | 手のひらと指先での圧力分布 | 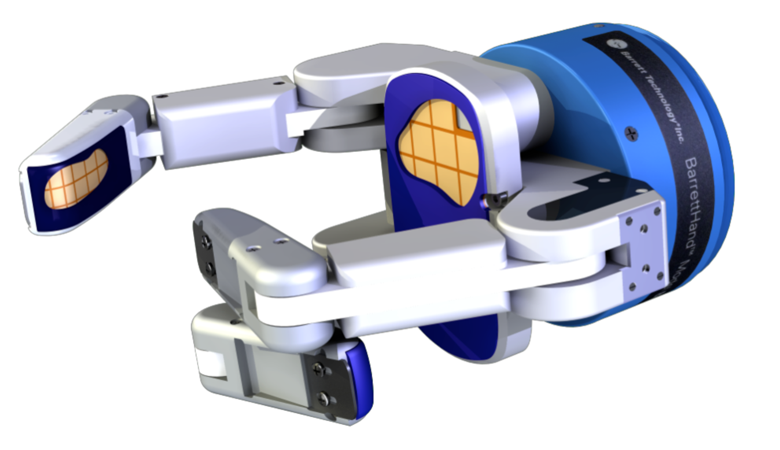 |
| 検出点数 | アクティブセル 96個 | |
| 検出素子 | 24導電素子セル(各パッド毎) | |
| 検出範囲 | 10 N/cm3 | |
| 分解能 | 0.02N/セル(サイズ 1.0cm2):手のひら 0.01N/セル(サイズ 0.3cm2):指 0.01N/セル(サイズ 0.15cm2):指先 |
|
| 3Dセンサ & ビジョン Perception Palm | |
| 3Dセンシングと3Dビジョンの為のカメラやセンサ類を掌部分に装着できるコンパクトな ユニットに集約。わずか6mmの厚さは違和感なく実装でき、3Dセンシングやビジョン 機能をハンドと一体化することが出来ます。 |
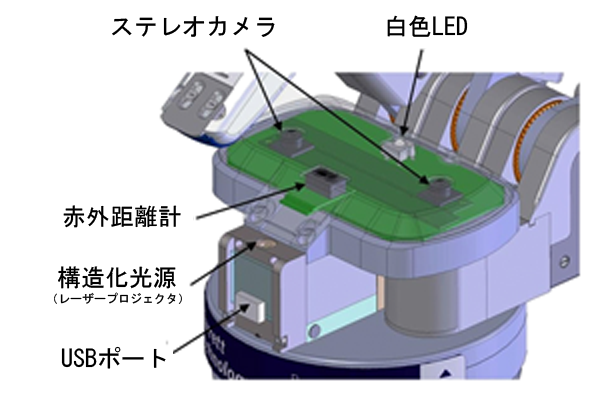 |
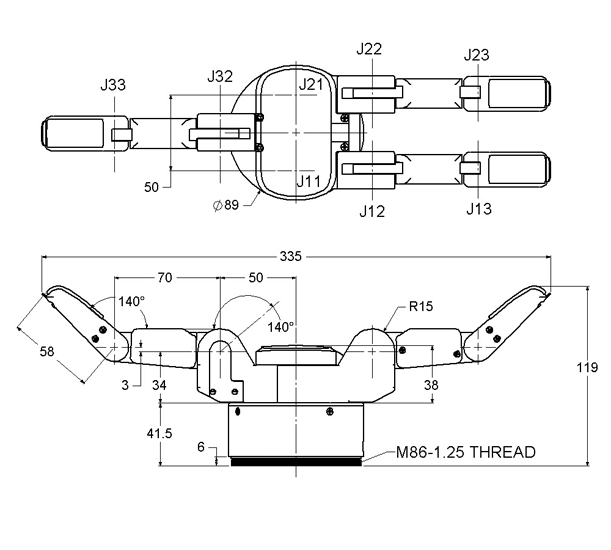
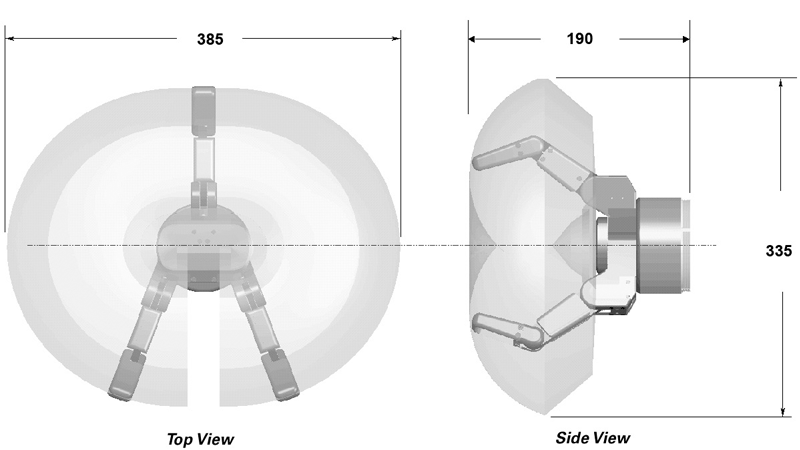
外形寸法 (単位:mm)
 |
 |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.