![]()
![]()
![]()
![]()
![]()
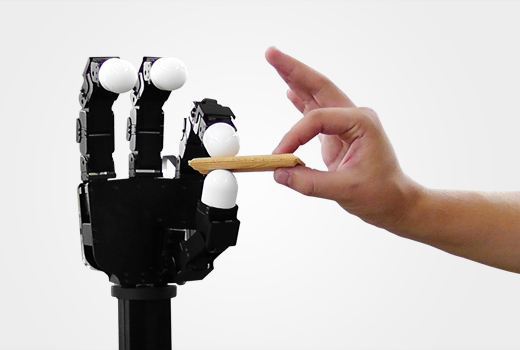
適応力に優れた低価格型ロボットハンド
AllegroHand
Allegro Handは適応力に優れた
低価格型ロボットハンドです。

4本の指と16個の個別電流制御が可能な関節でロボットハンドのグリップと制御のための
研究に適したプラットホームです。

|

|
| Grasp-move | Catching |

|

|
| Cylinder grasping | Free grasping |

|
|
特徴
・ 軽くて運搬が可能な擬人化されたデザイン
・ 研究および産業分野のアプリケーションで、経済的な費用で操作可能
・ 多様なオブジェクト ジオメトリーを処理できる、直ちに適用可能な多数のセンサーレス グリップ アルゴリズム提供
・ 可搬重量 1.5kg
・ 個別に電流制御可能な16の関節(4指x各4自由度)
・ Allegro Application Studio統合でコード変更およびシミュレーションなしでアルゴリズム プロトタイピング可能
・ リアルタイム制御とオンライン シミュレーション支援
ギャラリー
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
 |
豊富なチュートリアルとユーザーフォーラム
Allegro Hand用のソフトウェア開発に役立つドキュメントやチュートリアル、およびユーザーフォーラムが
用意されています。

仕様

| 指の数 | 親指を含む4指 | |
| 自由度 | 16 (4指x各4自由度) | |
| 駆動方式 | モーター | DC モーター |
| ギヤ比 | 1:369 | |
| 最大トルク | 0.70 Nm | |
| 最大関節速度 | 0.11 秒/60° | |
| 重量 | 指 | 0.17 kg |
| 親指 | 0.19 kg | |
| 合計 | 1.08 kg | |
| ジョイントエンコーダ | タイプ | ポテンシオメータ |
| 解像度 (公称) | 0.002 ° | |
| コミュニケーション | プロトコル | CAN |
| 周波数 | 333 Hz | |
| ペイロード | 5 kg | |
| 電力要件 | 7.4 VDC (7.0-8.1V)、最少 5A | |
copyright (C) Nihon Binary Co., Ltd., All rights reserved.